Understanding LiDAR
LiDAR 3D mapping is a versatile technology that surpasses passive sensing methods like photogrammetry by penetrating vegetation and operating effectively in low-light conditions. As a more applicable and user-friendly technology, LiDAR provides data that is quicker and easier to process. Phoenix LiDAR’s aerial solutions enable faster and more consistent area scanning compared to traditional ground scanning technologies, whether terrestrial or mobile mapping methods are used.
This section is designed to educate our customers and the public about LiDAR, highlighting the unique and innovative aspects of our solutions for a wide range of applications. Discover how Phoenix LiDAR sets the standard for efficiency and accuracy in 3D mapping.
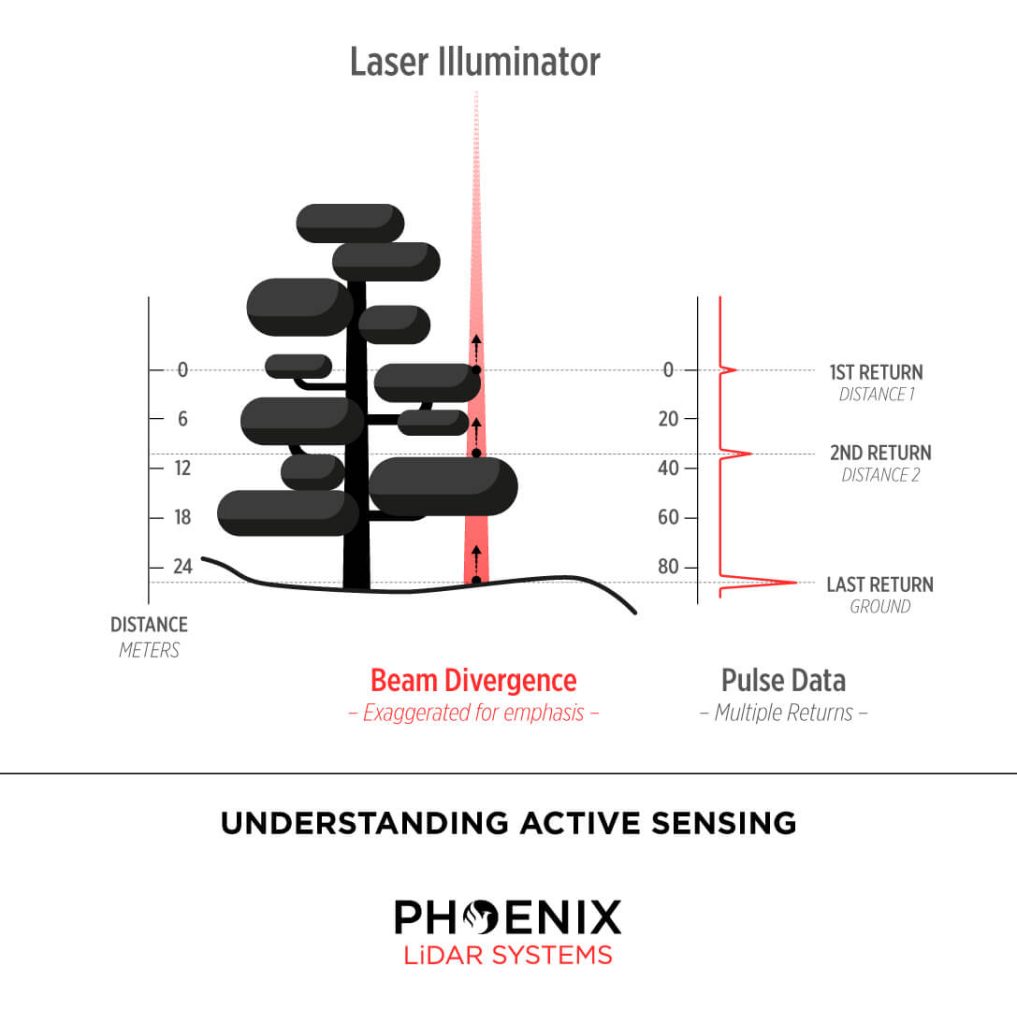
LiDAR, short for Light Detection and Ranging, is an advanced remote sensing technology used across a wide range of applications. Utilizing pulsed laser light, LiDAR measures distances through vegetation to the Earth’s surface, capturing precise surface data by calculating the time it takes for the laser pulses to return to their source.
To operate effectively, LiDAR systems require four essential components:
- The LiDAR Unit: This device emits pulses of light and, when mounted on a UAV, scans a predefined swath below.
- GPS Receiver: Tracks the unit’s x, y, z coordinates for precise location data.
- Inertial Measurement Unit (IMU): Monitors the unit’s tilt in space to ensure accurate elevation measurements.
- Computer: Records and processes all transmitted data.
These light pulses, capable of producing multiple returns, are processed alongside other system data to generate highly accurate three-dimensional information about the scanned surface. This powerful combination of technologies makes LiDAR an invaluable tool for producing detailed and reliable 3D mapping data.
How Does LiDAR Work?
The technique we employ to achieve centimeter-level precision is Real Time Kinematic Global Navigation Satellite System (RTK GNSS). This system enhances the satellite signal’s carrier wave along with the information content, relying on a single GNSS reference station for real-time corrections. During short GNSS outages, the Inertial Navigation System (INS) steps in.
The INS uses a computer, accelerometers, and gyroscopes to continuously calculate the system’s position, orientation, and velocity. To combine these systems, a sophisticated algorithm called linear quadratic estimation (LQE) processes streams of noisy sensor data, producing an optimal estimate of the system’s position at any given time. By fusing this information with the LiDAR data, a point cloud is generated and visualized in real-time using Phoenix Aerial SpatialExplorer.
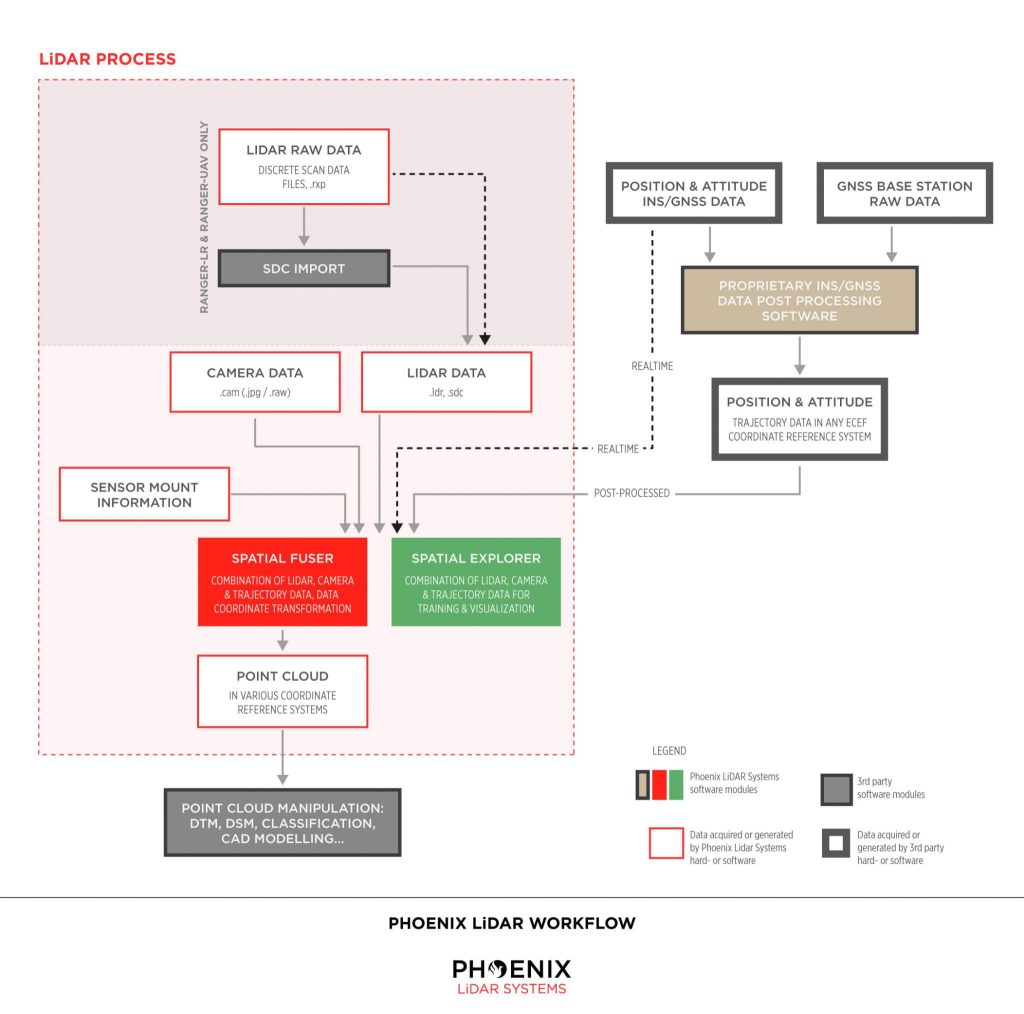
In scenarios where real-time corrections from the GNSS reference station are unavailable or prolonged outages occur, the third-party software Inertial Explorer™ can produce a precise trajectory in post-processing. Both real-time INS-generated trajectories and post-processed trajectories from Inertial Explorer™ can be fused with LiDAR data using Phoenix Aerial SpatialFuser to create point clouds in LAS format.
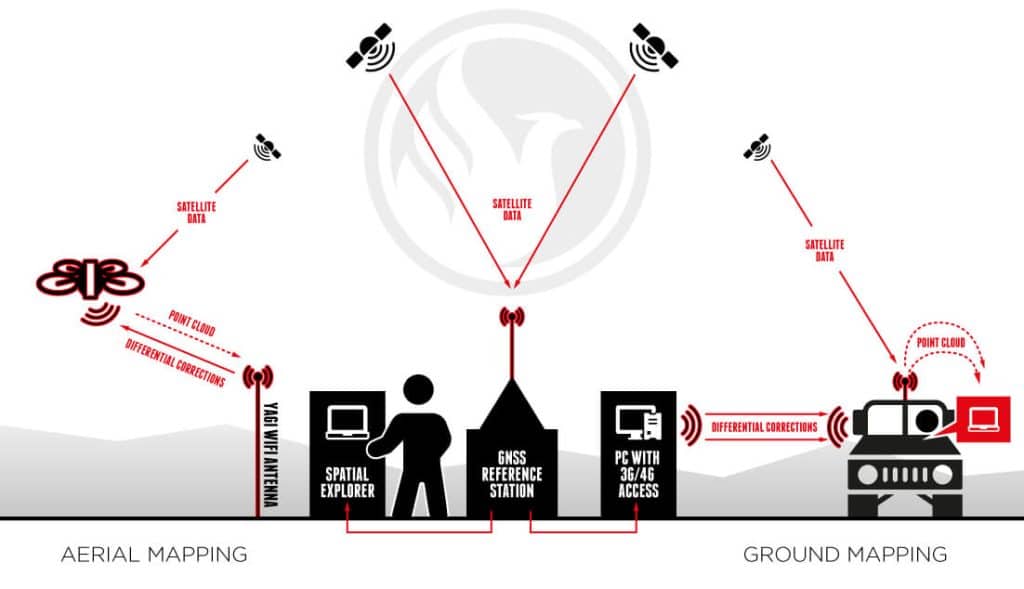
Phoenix Aerial LiDAR solutions are designed to attach to almost any vehicle, with flexible software to match. By separating sensor control from the user interface, multiple mapping options become possible:
Aerial Mapping Phoenix Aerial LiDAR solutions can be mounted on various vehicles such as UAVs, gyrocopters, and fixed-wing aircraft. Typically, the operator remains on the ground, connected to the GNSS reference station. Using Phoenix Aerial SpatialExplorer software, correction data is transmitted to the Rover via a long-range WiFi system. The Rover fuses this data in real time and transmits a down-sampled point cloud back to the operator.
Ground Mapping When traveling with the Rover in a car, boat, or ATV, the operator can connect directly to the Rover using WiFi or an ethernet cable. Correction data is transmitted from the GNSS reference station to the SpatialExplorer software via long-range WiFi or a public IP address (using 3G/4G). With an onboard 240 GB SSD hard drive, the operator can scan for up to 6 hours without needing to stop for data downloads.
Real-time Point Cloud Advantages Real-time point cloud visualization offers several key benefits:
- Immediate Results: Operators can instantly determine if the results meet expectations, avoiding the time-consuming and costly process of post-flight adjustments.
- Real-time Navigation: The growing point cloud can be visualized on a computer screen in real time, allowing the operator to identify unscanned areas and quickly alter the UAV’s course.
- Remote Collaboration: Through a 4G network, operators can share their screen with clients in real time to confirm or adjust the LiDAR point cloud.
Phoenix Aerial LiDAR solutions provide unparalleled flexibility and precision, making them an essential tool for various mapping applications. Whether for aerial or ground-based operations, our technology ensures high-quality, accurate data collection and real-time processing capabilities.
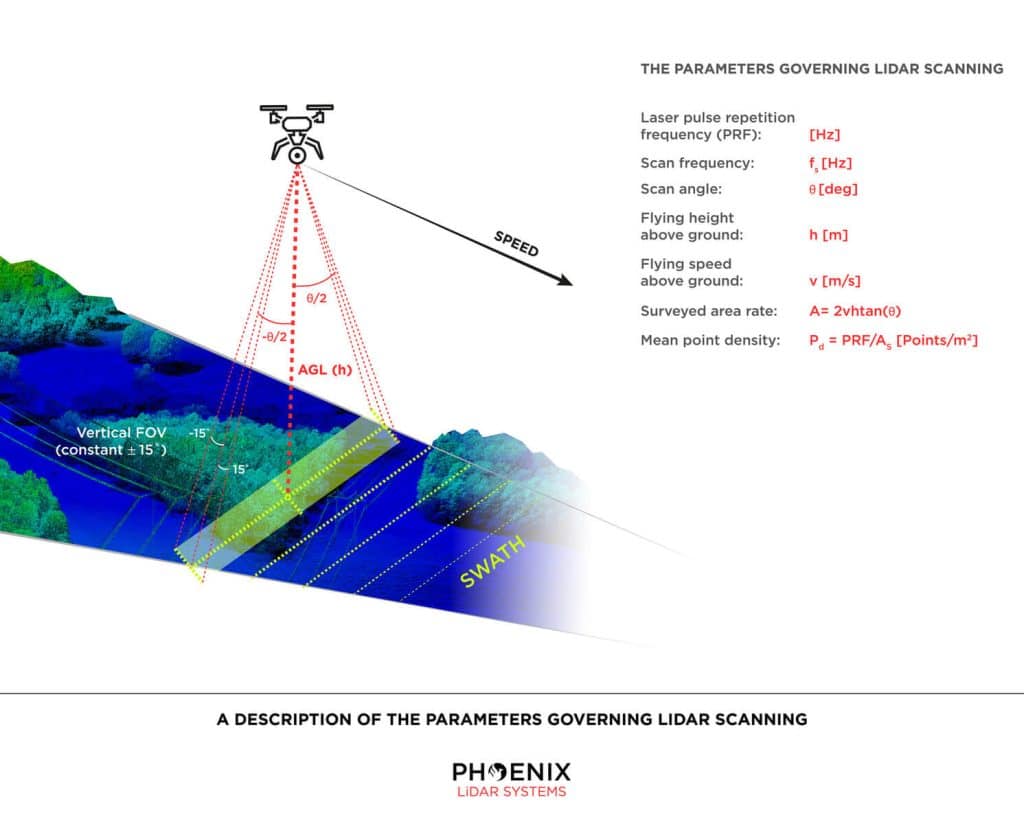
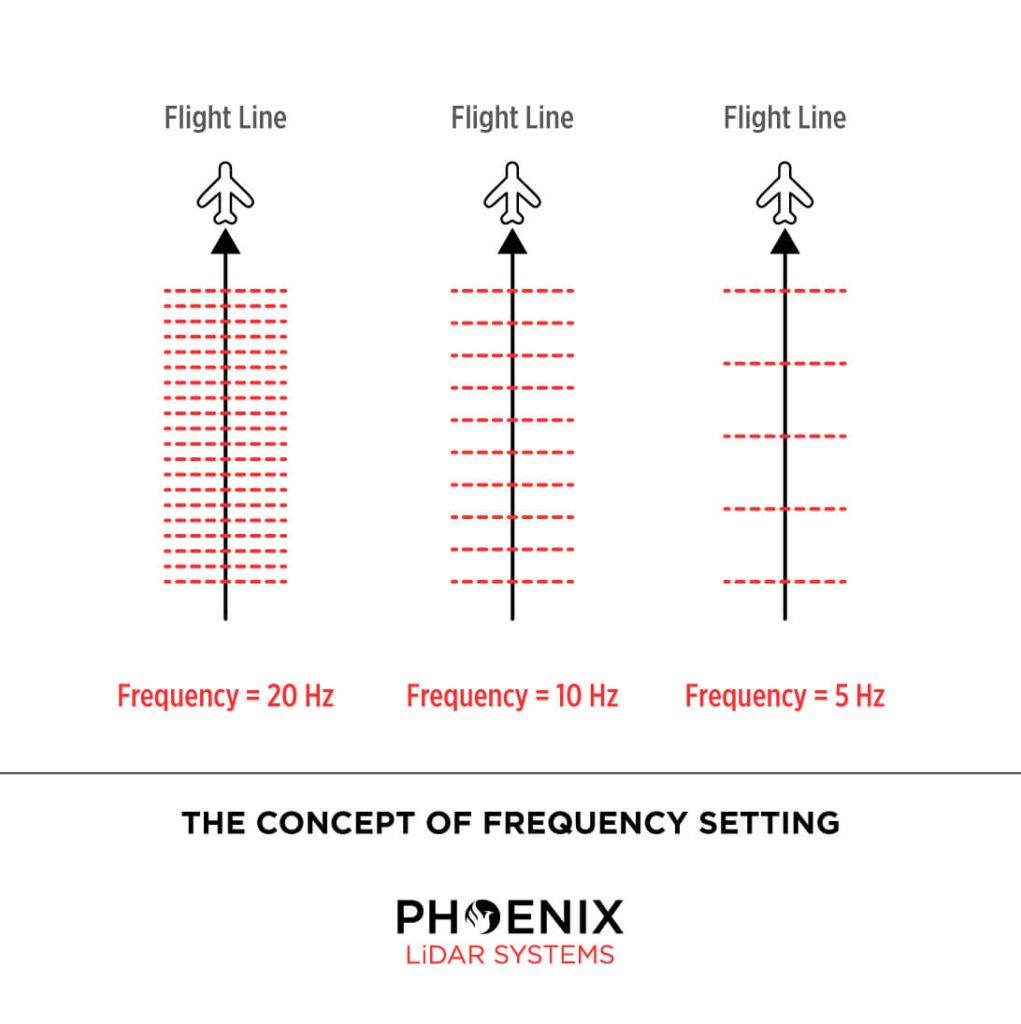
Parameters for LiDAR Scanning Via UAV
Phoenix LiDAR Systems builds systems meant for mobile mapping. Surveying from a moving object is accompanied by certain parameters an operator must take into account: speed, scan area, altitude, frequency, pulse rate, scan angle and point density all play an integral role in capturing data. Note that you will obtain a scan swath of varying ranges and densities depending on these parameters. Actual accuracy is dependent on GPS processing options (RTK, PPK, WAAS), ionospheric conditions, satellite visibility, flight altitude (AGL) and other factors.

Phoenix LiDAR Workflow
Real-time vs Post Processed
In RTK (Real Time Kinematic) mode, about 500 bytes of differential corrections are sent from the reference station to the rover about once every second. Applying these corrections, the rover is able to solve its position with centimeter-accuracy.
The differences between RTK mode and post-processing are:
- post-processing requires extra software
- post-processing does not require a real-time connection between reference station and rover
- post-processing will often compute more accurate results, especially in environments with bad satellite visibility (ground scanning)
- post-processing allows the user to better judge the solution’s accuracy
Need More Help?
We understand that LiDAR technology can be overwhelming. Don’t worry. We’re here to help. Contact us Monday – Friday, 9am – 5pm PST.
+1.323.577.3366

{kind=link}
{kind=link}
{kind=link}