PHOENIX FLIGHTPLANNER
Sensor specific planning for efficient and successful data acquisition
Phoenix’s FlightPlanner is an easy to use browser based mission planning application. Explore the effects that different sensor and vehicle parameters have on your data before you acquire. Estimate expected data properties to ensure you collect what you need. Utilize derived flight characteristics to schedule field resources accordingly.
FlightPlanner can plan wide area, corridor and custom path projects and export missions formatted directly for UAV controllers or piloted MissionGuidance.
FlightPlanner can plan wide area, corridor and custom path projects and export missions formatted directly for UAV controllers or piloted MissionGuidance.
KEY FEATURES

PLAN
- Sensor specific automatic flight planning
- LiDAR and Camera planning
- Terrain following
- Multi-mission project planning
- Automatic plan from an uploaded KML boundry
- Mission types: wide area, corridor, free waypoint
- Automatic INS alignment maneuvers
- Flight and sensor parameter configuration
- Easy web based access
VERIFY
- LiDAR sensor model (range/reflectivity) limitations
- Lidar output estimates
- point density
- point distance
- Camera output estimates
- frame count
- recommended trigger interval
- expected GSD
- min/max overlap
- Flight time and flight count estimation
- QC maps
EXPORT
- Flight controller specific export
- Litchi
- QGroundControl
- DJI Pilot2
- SpatialExplorer
- Google Earth KML QC report
- Saved missions library & profiles
HOW TO
FlightPlanner is easy to use
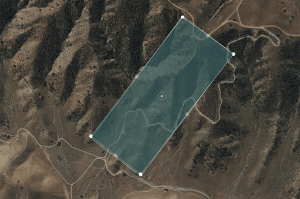
1. Import or draw your area boundary
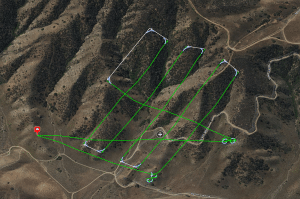
2. Configure vehicle and sensor setting, then click “Calculate Flight Plan”
3. Export the plan for your flight controller
Check the comprehensive User’s Manual for detailed instructions
REQUIREMENTS
FlightPlanner is crunching a lot of data, which can be a challenge for some browsers. We recommend using Chrome or Safari, with few or no other tabs open. If equipped, set your browser to use your NVIDIA graphics card.