Search
Resource Type
Industry
Products
Sort

Featured Article: “Inventing the Workflow: How Phoenix LiDAR Helped Build the Market It Now Serves” from xyHt.
Commercial UAV LiDAR has evolved from a niche technology into an essential tool for surveying, engineering, utilities, transportation, and infrastructure mapping. That transformation was driven not only by advances in sensors, but also by the development of complete workflows that made the technology practical and repeatable in the field.
In this feature published by xyHt, the publication explores Phoenix LiDAR’s role in helping establish the commercial UAV LiDAR market through innovations in hardware integration, software development, customer training, and workflow automation. The article looks back at the industry’s early challenges and examines how complete mapping solutions helped accelerate adoption across the geospatial community.
The feature also examines the evolution of Phoenix LiDAR Systems, from its founding by Grayson Omans and Ben Adler to its acquisition by Revolution Geosystems. By combining Phoenix’s turnkey LiDAR hardware and software expertise with Revolution’s aviation and equipment rental services, the partnership strengthens its ability to provide comprehensive geospatial solutions spanning data acquisition, processing, and project support.
Read the full feature on the xyHt website to learn more about the evolution of commercial UAV LiDAR and Phoenix LiDAR’s contribution to the industry.
Related Resources:

Featured Article: “Designing LiDAR Around the Workflow” from xyHt
Survey-grade mapping depends on far more than advanced sensors. It requires a complete workflow that connects mission planning, data acquisition, calibration, processing, quality control, and final deliverables into a consistent, repeatable process.
In this feature published by xyHt, Phoenix LiDAR President Rob Dannenberg discusses why the company has built its hardware, software, and deployment model around the workflow rather than individual platforms.
The article explores how modular hardware, integrated software, automation, and platform-agnostic design help surveying and infrastructure professionals achieve consistent results regardless of vehicle collection method. By creating a strong, singular workflow, Phoenix LiDAR users can use the same workflow regardless of the acquisition platform. For example, the RANGER-Flex system is designed to be used across vehicles: UAV, mobile, backpack, and even manned aircraft.
Read the full feature on the xyHt website to learn more about the history of UAV LiDAR and how workflow innovation continues to drive the industry forward.
Related Resources:
Featured Article: “The Chain That Counts” from xyHt
Producing survey-grade drone data requires more than advanced sensors; it depends on an integrated workflow that ensures accuracy from collection through final deliverables.
At XPONENTIAL 2026 in Detroit, industry leaders from across the geospatial ecosystem gathered to discuss one of the biggest challenges facing drone mapping today: transforming raw sensor data into survey-grade deliverables that professionals can trust. The panel explored every stage of the workflow from positioning and sensor fusion to quality assurance, GIS integration, and final project delivery.
Phoenix LiDAR President Rob Dannenberg joined representatives from Trimble Applanix, GEODNET, and Esri to share practical insights into the technologies, processes, and industry standards that help ensure reliable mapping results. The discussion also addressed evolving topics including GNSS corrections, SLAM, ground control, quality control, workforce development, and what “survey grade data” really means in today’s geospatial industry.
This article, published by xyHt, provides an excellent overview of the complete drone mapping workflow and the considerations that separate successful data collection from dependable project deliverables.
Read the full article “The Chain That Counts” on the xyHt website.

In this LiDAR News original article, “Airborne LiDAR Lays Foundation for Oklahoma Energy Project,” covers a large-scale LiDAR mapping project to prepare for an energy development project.
Airborne LiDAR continues to play an important role in supporting large-scale energy and infrastructure development by delivering accurate, high-resolution terrain data quickly and efficiently. This case study examines how the Blew & Associates team used the RANGER-U240 to support an energy project in Oklahoma and the benefits it provided throughout the surveying and planning process.
Download the PDF below, or read the original article on LiDAR News to read the whole piece.

As NDAA compliance becomes an increasingly important consideration across surveying, mapping, engineering, and infrastructure projects, many organizations are seeking clarity on how evolving federal procurement requirements affect LiDAR technology and geospatial workflows.
To help explain this rapidly changing landscape, Lidar News recently published an in-depth article featuring insights from Phoenix LiDAR Systems President Rob Dannenberg. The article explores what NDAA compliance means for LiDAR users, how recent legislation is shaping procurement decisions, and why organizations are increasingly evaluating complete mapping workflows, not just sensors, when assessing compliance.
The PDF below contains the full article by Lidar News in a downloadable format. For the original online version and additional industry coverage, visit the Lidar News article here.
Explore our RANGER series to learn more about Phoenix LiDAR’s NDAA compliant lidar systems.
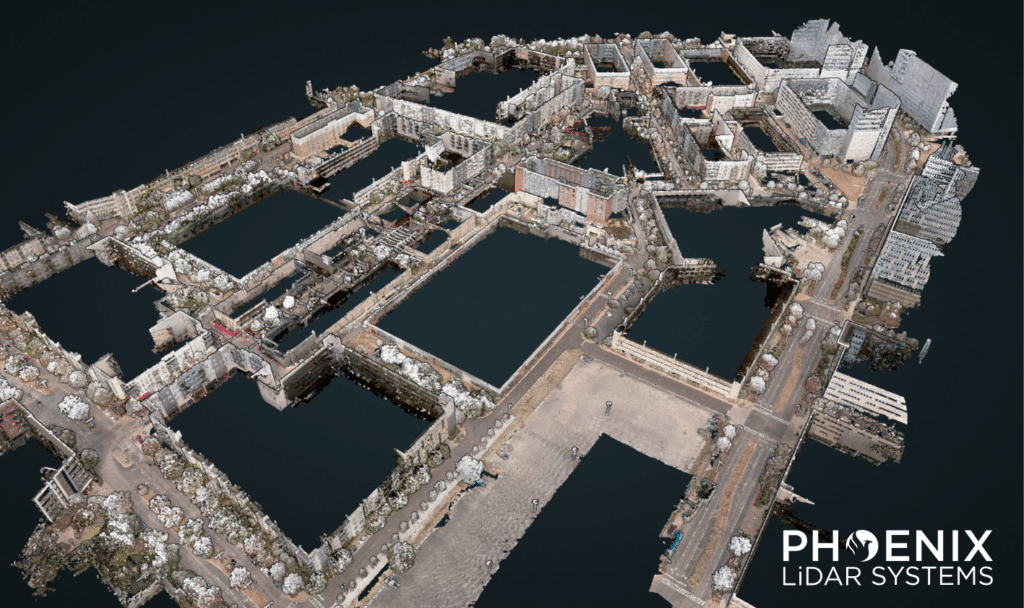
Colorized RANGER-FLEX RFM2 dual head data set, utilizing the Mosaic X panoramic camera for colorization.

This RECON-F4 demo was collected during 2 flights at 80 m AGL (although this scanner is capable of producing great data even higher), 10 m/s with the RECON-F4, and processed in SpatialExplorer. Relative accuracy between flightlines came in at 0.064 US-ft, and the data hit surveyed check points at 0.07 US-ft without needing adjustment to control. The point cloud was colorized using imagery from the integrated full-frame camera.

Careers in geospatial technology rarely follow a straight line, and Russell White’s is no exception. Today, he serves as Geospatial Technology Manager at CS Tech AI, where he’s building advanced aerial and mobile LiDAR programs to support large-scale infrastructure and utility projects. But his path to this role has taken him through traditional land surveying, early terrestrial laser scanning, UAV LiDAR, and mobile mapping; evolving right alongside the technology itself.
What makes Russell’s story especially unique isn’t just the roles he’s held, but the consistency of one key decision: at every stop along the way, he’s chosen to bring Phoenix LiDAR Systems with him. Across four different companies, Russell has advocated for Phoenix solutions; introducing new systems, scaling mapping programs, and helping teams expand their technical capabilities. Along the way, he has relied on a range of Phoenix platforms, including the miniRANGER Lite, Scout/XT32, and, most recently, the Phoenix RANGER-Flex, to support both aerial and mobile mapping workflows. For him, it’s never been about chasing the newest hardware, but about working with a partner who provides the training, support, and flexibility needed to deliver real-world results.
In this success story, Russell shares how each career transition reinforced that choice and why Phoenix has remained a constant as his responsibilities, projects, and ambitions have grown.
Download the PDF to read this whole Phoenix LiDAR Customer Success Story to learn how Russell has implemented Phoenix systems across four companies and why he considers Phoenix an extension of his team.
Also published on LiDAR News’ website here.
Watch this video interview on YouTube here.

FOR IMMEDIATE RELEASE
[Huntsville, AL] — February 20, 2026 — Revolution Geosystems, a leader in comprehensive geospatial solutions, announces the successful acquisition of Phoenix LiDAR Systems, a pioneer in flexible survey-grade lidar mapping solutions. This strategic move unites two powerhouses in the industry.
The integration of Phoenix LiDAR Systems into the Revolution Geosystems family marks a significant milestone in the company’s mission to provide “all-under-one-umbrella” services. By combining Phoenix’s world-class hardware and software with Revolution Geosystem’s aviation and equipment rental services, the acquisition bolsters Revolution Geosystems’ services to support the geospatial market in three key areas:
Turnkey Hardware: Revolution Geosystems’ expanded portfolio will now include Phoenix LiDAR System’s turnkey hardware solutions for both manned and unmanned platforms, recognized for versatility and industry-first innovations, alongside proven mobile mapping technologies.
Advanced Data Processing Tools: With Phoenix’s powerful software suite, Revolution clients gain access to a comprehensive software environment for mission planning, data processing, and analysis, helping reduce turnaround times and accelerate decision-making. This enables our clients to be even more efficient with the data they collect.
Enhanced Service Capabilities: The deal deepens Revolution’s ability to provide a full-service ecosystem of equipment, software, and aerial acquisition services, ensuring clients have the exact tools they need for project success.
“This acquisition is a perfect alignment of strengths,” said Paul Rossouw, CEO of Revolution Geosystems. “Phoenix LiDAR Systems has built a reputation for pushing the boundaries of what is possible in remote sensing. By bringing their turnkey integrated lidar payloads and experienced software development team into our family, we are offering our clients a deeper level of support and a more seamless path to geospatial data acquisition and processing than ever before.”
“Joining forces with Revolution Geosystems allows us to scale our technology and reach a broader audience of professionals who need precision and reliability,” said Rob Dannenberg, CEO of Phoenix LiDAR Systems. “We are excited to integrate our hardware and software expertise into Revolution’s robust service model, ensuring our users continue to lead the way in their respective fields.”
Current Phoenix LiDAR Systems customers can expect a seamless transition, with continued support for existing products and an expanded roadmap for future innovations.
ABOUT REVOLUTION GEOSYSTEMS
Revolution Geosystems is a premier provider of geospatial equipment and aerial acquisition services. The company offers its fleet of over 50 modern Cessna Caravans, Cessna 206H aircraft, sensor rentals, and a global equipment online marketplace to geospatial clients.
ABOUT PHOENIX LIDAR SYSTEMS
Phoenix LiDAR Systems offers a full line of turnkey, integrated lidar systems for unmanned and manned aerial acquisition, robust mobile mapping lidar solutions, and a full suite of planning, acquisition, and processing software.
MEDIA CONTACT:
Lisa McConnell
Vice President – Marketing & Sales
303-819-8714
LiDAR remote sensing systems utilizing GNSS/INS are reliant on the integration of an accurate Inertial Measurement Unit (IMU) to achieve high-quality data. The IMU forms the core of the navigation system, which is used to estimate a trajectory. This
trajectory is then used for georeferencing (“fusing”) raw LiDAR range data into a point cloud. IMUs vary in terms of performance and price, so selecting the right IMU for a given LiDAR application is an important step.
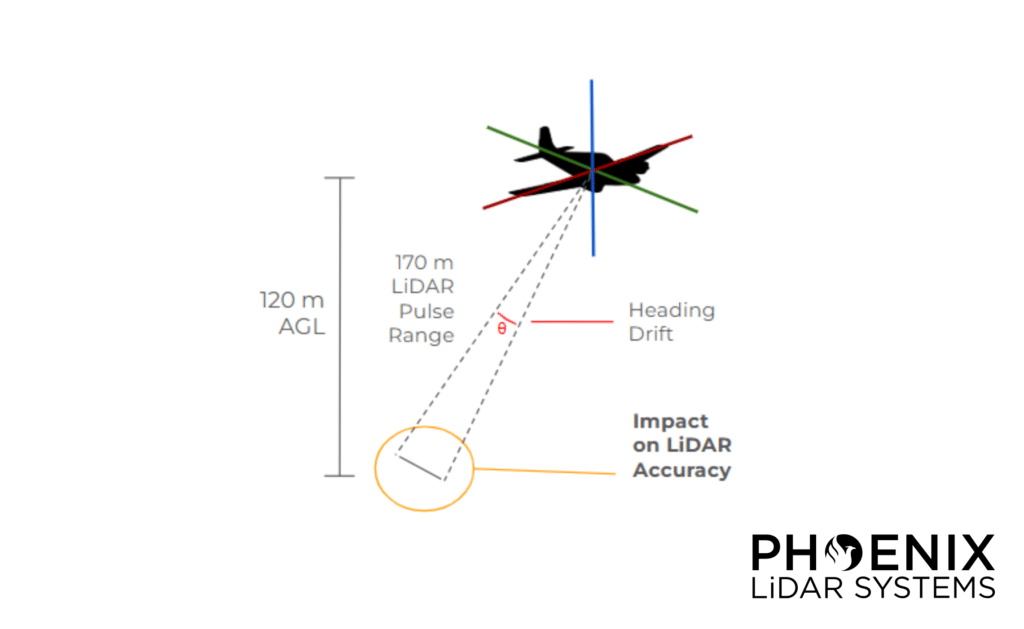
IMU hardware collects data from gyroscopes and accelerometers. Gyroscopes, which are used to measure rates of rotation along 3 axes (roll, pitch, and yaw), have inherent measurement imperfections. When a gyroscope is stationary and not rotating, output
measurements, which should be constant due to the lack of rotation, will in fact change, or drift, over time. It’s important to consider that an IMU may drift along certain axes, even when not completely stationary. For example, traveling with a constant heading means that the gyroscope associated with measuring heading is nearly at rest and subject to drift. Drift along the heading axis is typically more impactful than the drift observed along the pitch and roll axes, as “A good portion of the pitch (attitude) and roll axis gyroscope drift can be removed within an IMU through the use of accelerometer feedback to monitor position relative to gravity” (Analog Devices, 2017).
Heading drift is most pronounced when a vehicle travels in a relatively straight path for a prolonged period of time, as heading estimates degrade in accuracy due to an accumulation of gyroscope noise. This is particularly problematic with aerial LiDAR
data acquisition, as single-grid type and corridor acquisitions must take into account how long the IMU can travel in a straight path without accumulating too much drift. To mitigate this, operators will typically limit their flight line lengths accordingly or
perform dynamic maneuvers in the middle of long flight lines.
Download the whitepaper to learn more.
View our other whitepapers in our resource library.