LiDAR remote sensing systems utilizing GNSS/INS are reliant on the integration of
an accurate Inertial Measurement Unit (IMU) to achieve high-quality data. The IMU
forms the core of the navigation system, which is used to estimate a trajectory. This
trajectory is then used for georeferencing (“fusing”) raw LiDAR range data into a point
cloud. IMUs vary in terms of performance and price, so selecting the right IMU for a
given LiDAR application is an important step.
IMU hardware collects data from gyroscopes and accelerometers. Gyroscopes, which
are used to measure rates of rotation along 3 axes (roll, pitch, and yaw), have inherent
measurement imperfections. When a gyroscope is stationary and not rotating, output
measurements, which should be constant due to the lack of rotation, will in fact change,
or drift, over time. It’s important to consider that an IMU may drift along certain axes,
even when not completely stationary. For example, traveling with a constant heading
means that the gyroscope associated with measuring heading is nearly at rest and
subject to drift. Drift along the heading axis is typically more impactful than the drift
observed along the pitch and roll axes, as “A good portion of the pitch (attitude) and roll
axis gyroscope drift can be removed within an IMU through the use of accelerometer
feedback to monitor position relative to gravity” (Analog Devices, 2017).
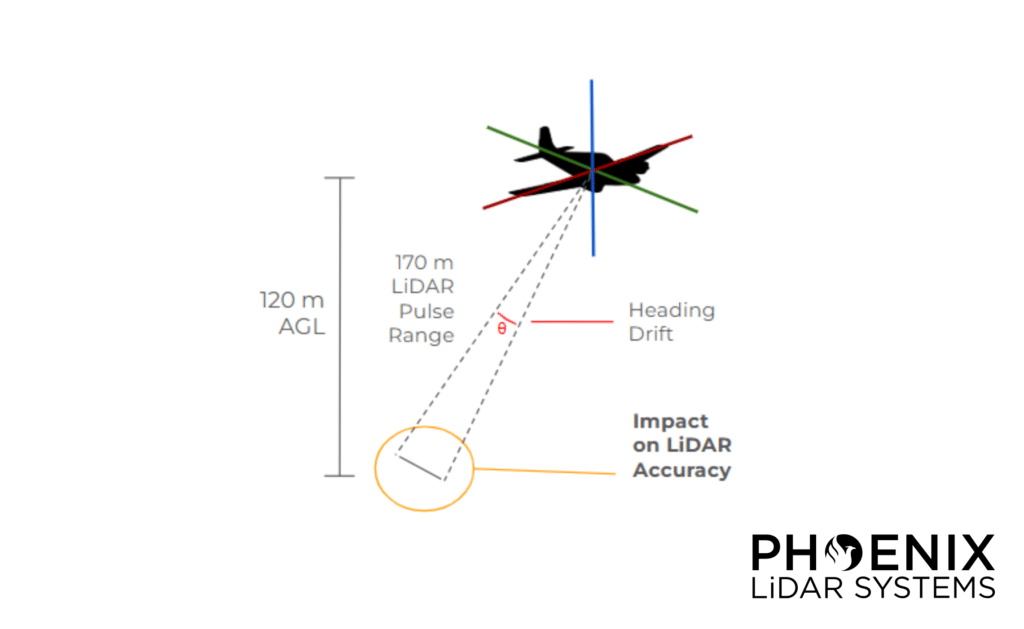
Heading drift is most pronounced when a vehicle travels in a relatively straight path
for a prolonged period of time, as heading estimates degrade in accuracy due to an
accumulation of gyroscope noise. This is particularly problematic with aerial LiDAR
data acquisition, as single-grid type and corridor acquisitions must take into account
how long the IMU can travel in a straight path without accumulating too much drift.
To mitigate this, operators will typically limit their flight line lengths accordingly or
perform dynamic maneuvers in the middle of long flight lines.
Download the whitepaper to learn more.
{kind=link}
{kind=link}
{kind=link}