Product
Evolving the Capabilities of LiDAR
With the introduction of the RECON series, Phoenix LiDAR Systems is removing barriers to widespread LiDAR remote sensing adoption. The RECON series combines low-cost hardware with Phoenix LiDAR Systems industry leading software, LiDARMill, and is empowering a new generation of professionals like never before.
The RECON series features higher accuracies than competing products (that are based on Applanix or DJI navigation systems), while offering extremely simple, automated post-processing solutions to extract maximum value from each dataset.
Utilizing the LiDARMill online, automated processing platform, raw datasets can be imported straight from a USB drive, with reference and optional ground control data seamlessly integrated. Simple wizards enable advanced processing options like trajectory optimization, LiDAR and camera calibration, AI classification, smart decimation and the creation of high-quality deliverables (contours, DTM/DSM/CHM, pointcloud tiling etc.). A fully registered, colorized pointcloud is produced that is accurate in both relative and absolute terms. Project reports then summarize project performance and verify system accuracy.
Phoenix Lidar Systems is committed to designing the world’s most advanced, complete LiDAR solutions. With the RECON + LiDARMill combination, users can deploy a simple toolkit that is able to derive accurate and reliable datasets in a matter of hours. Powerful, affordable, and comprehensive…the RECON series by Phoenix Lidar Systems is now available, and sure to disrupt the remote sensing industry.
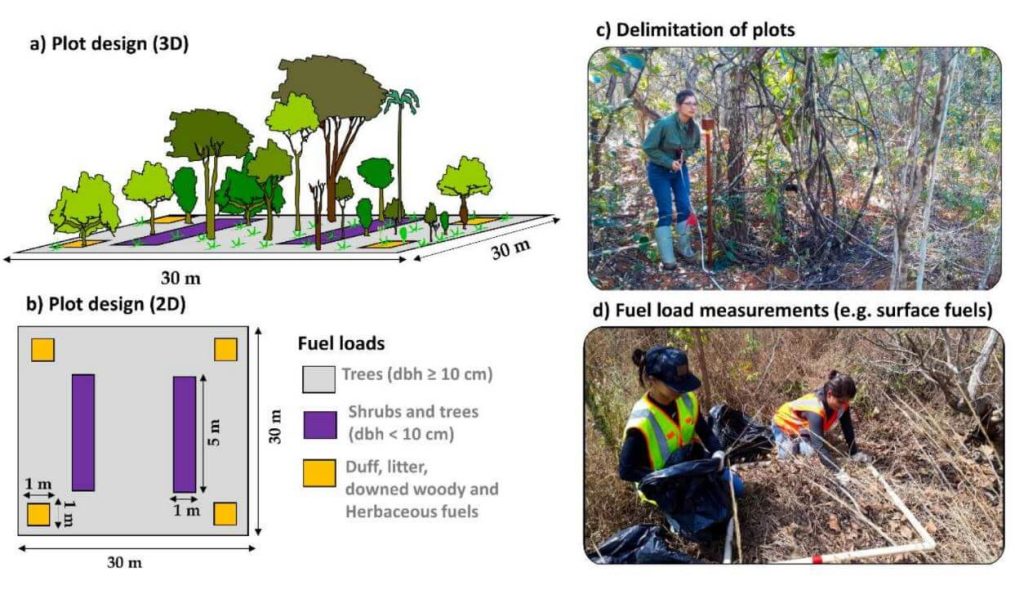
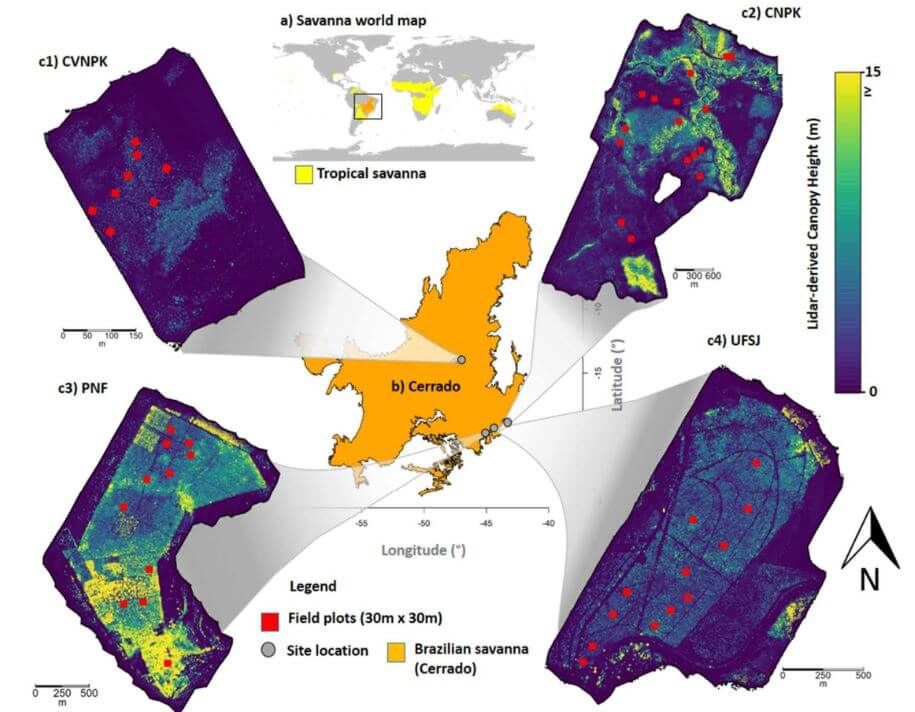
This whitepaper explores a groundbreaking framework for quantifying fuel load in fire-prone regions, focusing on the Brazilian tropical savanna (Cerrado biome), using NASA’s GEDI full-waveform spaceborne LiDAR sensor. Understanding fuel load is crucial for integrated fire management, preserving carbon stock, biodiversity, and ecosystem functioning, and assessing global climate regulation. Traditional remote sensing methods lack the capability to measure vertical vegetation structure accurately.
Our study leverages UAV-collected LiDAR data to simulate GEDI full-waveforms, from which we derive vegetation structure metrics. These metrics are then correlated with field-measured fuel load components using Random Forest models. The resulting models, which predict woody and total fuel loads with high accuracy (R² = 0.88 and 0.71, respectively), provide reliable estimates even for lower strata components.
This innovative approach allows for the creation of fuel load maps for the entire Cerrado and can be extended to other fire-prone regions, enhancing fire management and carbon monitoring efforts. This research showcases the potential of spaceborne LiDAR to revolutionize environmental management and climate initiatives in tropical savannas and beyond.
In recent years, airborne laser scanning has revolutionized the documentation of historic cultural landscapes, extending its applications from natural landscapes to built environments. The integration of unoccupied aerial vehicles (UAVs) with LiDAR systems is a transformative advancement, providing complementary data for precise mapping of targeted areas.
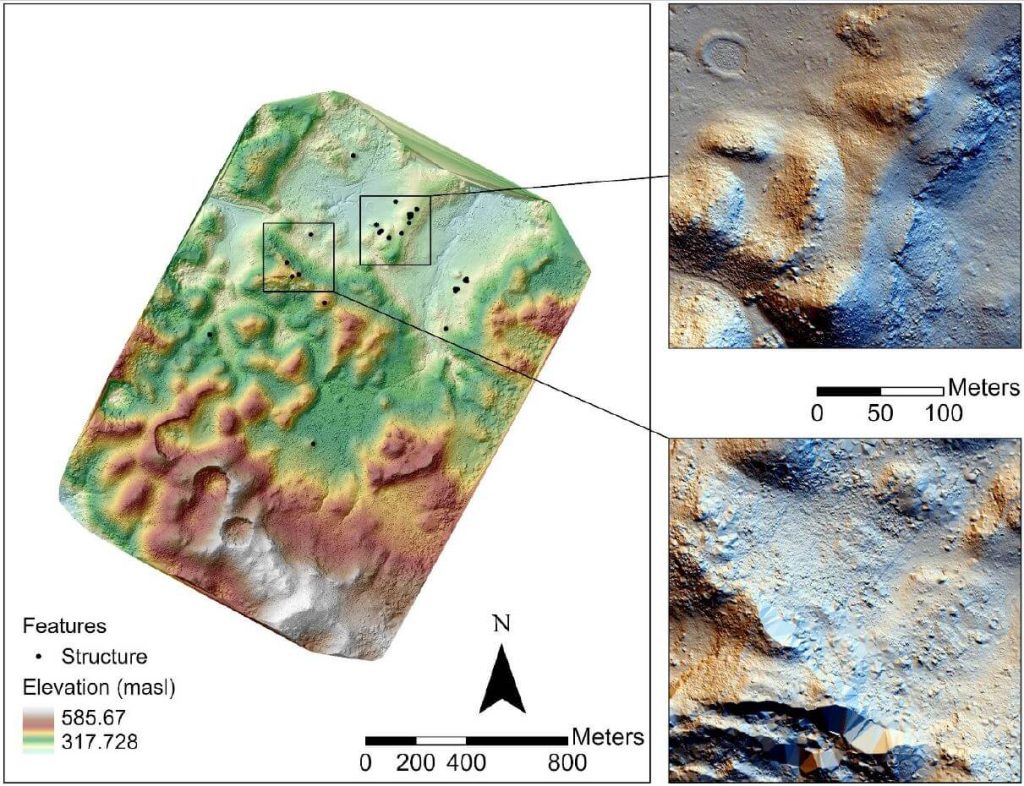
This whitepaper presents the findings from a 2019 study in the Maya Lowlands of Chiapas, Mexico, utilizing UAV LiDAR to capture and analyze data from six archaeologically significant areas. These areas, characterized by diverse environments, land cover, and archaeological features, were studied for their pre-Hispanic settlements and agrarian landscapes. The results confirm the immense potential of UAV LiDAR systems for high-precision archaeological mapping and underscore the importance of multidisciplinary collaboration.
The high-precision data acquired is invaluable for mapping archaeological features and understanding long-term land use and landscape changes in archaeological contexts.

Join the May 2021 Phoenix LiDAR Systems webinar, hosted by Senior GIS Engineer Ira Monkfold, as he dives into survey-grade calibration and accuracies from point cloud data. This insightful session focuses on the LiDAR Snap 4 calibration tool within the SpatialExplorer software. Learn about the essential requirements for achieving precise point cloud data and how Phoenix LiDAR Systems can help you create survey-grade data effortlessly.
Ira explains the critical importance of precise system calibration, covering accurate measurements of lever arms and the alignment of laser, GNSS, and IMU components. He highlights the necessity of mission-specific optimization to address in-flight anomalies, ensuring data accuracy. The integration of surveyed ground control points is emphasized as a vital step for achieving geospatial accuracy, with LiDAR Snap 4 providing comprehensive calibration and reporting tools.
LiDAR Snap 4 revolutionizes the calibration process by combining multiple steps into a single, user-friendly software interface, significantly reducing complexity and time. The software features advanced capabilities such as encoder calibrations and trajectory optimizations, offering users reliable survey-grade point cloud data. The webinar also includes a Q&A session, addressing software capabilities, processing times, and compatibility with various LiDAR systems and platforms.

Join the Phoenix LiDAR Systems September 2021 webinar, hosted by Conrad Conterno and Ben Adler, focusing on airborne LiDAR data acquisition with manned aircraft. This session highlights the advantages of using fixed-wing aircraft and helicopters for LiDAR mapping, including increased flight speed, height, and the ability to cover large areas efficiently. Conrad Conterno, the post-processing manager, and Ben Adler, CTO and co-founder, introduce the new mission guidance feature of SpatialExplorer, a software that enhances real-time flight mission execution.
Learn about the different mission types available in the flight planner, such as wide-area mapping, corridor mapping, and line points mode. Discover how to incorporate various sensor types and models for accurate planning, ensuring optimal density, overlap, and resolution. The webinar includes a detailed demonstration of MissionGuidance, showcasing tools like dynamic whiskers for real-time navigation and the touch-and-go mode for pilot-initiated flight lines.
Understand the importance of precise flight planning and execution for high-quality LiDAR data and efficient post-processing. The session concludes with a Q&A, addressing flight plan creation, altitude calculations, and system adaptability. Explore the future of LiDAR mapping with Phoenix LiDAR Systems’ advanced technology and mission guidance capabilities.
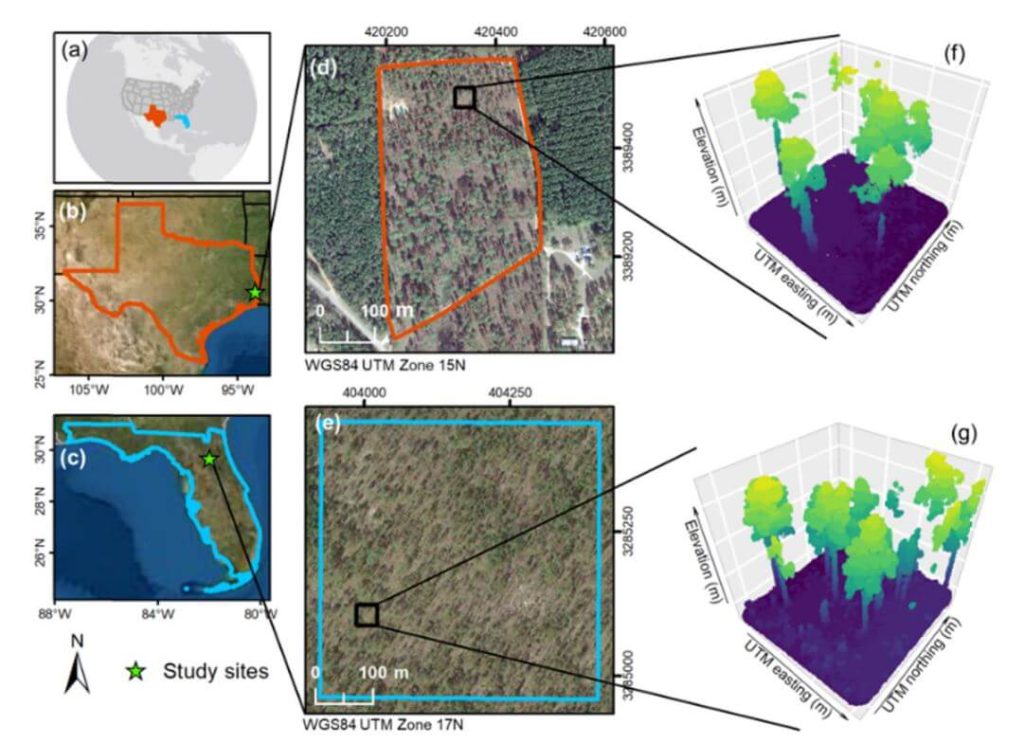
The proliferation of unmanned aerial vehicles (UAVs) over the past decade has been driven by advancements in structure-from-motion (SfM), machine learning, and robotics. A crucial application in forestry is individual tree detection (ITD), essential for calculating forest attributes like stem volume, forest uniformity, and biomass estimation.
This whitepaper addresses the challenges users face in adopting UAVs and algorithms for specific projects by providing a detailed tutorial for performing ITD. It covers the use of low-cost UAV-derived imagery and UAV-based high-density LiDAR, utilizing open-source R packages to develop a canopy height model (CHM) and implement the local maxima (LM) algorithm for ITD.
Accuracy assessments are derived through manual visual interpretation and field-data validation. Targeted at beginners in remote sensing, this guide employs a simple methodology and uses study plots with relatively open canopies. Supplementary materials include R codes and sample plot data to facilitate practical application.
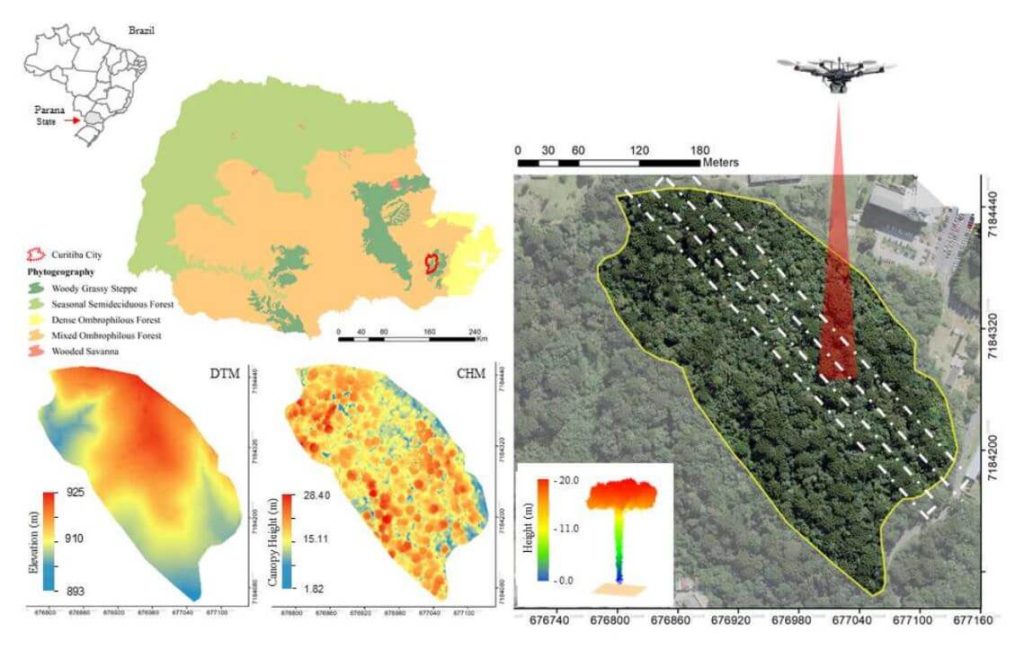
This whitepaper explores the role of urban forest remnants in mitigating climate change by reducing carbon dioxide levels in urban areas. Specifically, it focuses on the potential of UAV-LiDAR systems to accurately measure individual tree heights in an Urban Atlantic Forest, using Araucaria angustifolia trees as a case study.
Through detailed analysis, the study assesses the impact of varying point densities (ranging from 2,500 to 5 returns per square meter) on the accuracy of tree height measurements. The findings reveal that higher point densities provide more precise tree profiles, while lower densities result in gaps in the Crown Height Model (CHM). The research highlights that the optimal point density for the highest agreement between UAV-LiDAR -derived and field-based tree heights is 100 returns per square meter, with the lowest relative root mean square error (rRMSE) observed at 50 returns per square meter.
This whitepaper underscores the effectiveness of UAV-LiDAR technology in urban forest management and its implications for developing policies to maintain essential ecosystem services.
This whitepaper delves into the pivotal role tropical savanna ecosystems play in the global carbon cycle, particularly focusing on the Brazilian Savanna (Cerrado). It examines the uncertain capacity of these ecosystems to store and sequester carbon due to the intertwined effects of human activities and climate change. Utilizing high-density UAV-LiDAR technology, this study provides a comprehensive analysis of the above ground biomass density (AGBt) across diverse vegetation formations in Cerrado, including forests, savannas, and grasslands.
The research highlights the development and validation of regression models to estimate AGBt, emphasizing the model that incorporates vegetation height and cover as the most effective, achieving an adjusted R2 of 0.79. This model was used to map AGBt over a vast area, demonstrating the feasibility and potential of UAV-LiDAR in accurately estimating biomass. Additionally, the study underscores the necessity for improved biomass estimation in grasslands to enhance the understanding of the global carbon balance and support integrated fire management.
The findings presented in this whitepaper provide critical insights and benchmarks for future research, aiming to generate precise biomass maps and inform effective carbon emission mitigation strategies in tropical savanna ecosystems.
This whitepaper investigates the innovative use of UAV-borne hyperspectral and LiDAR data to enhance our understanding of forest ecosystem restoration. Focusing on twelve 13-year-old restoration plots in the Brazilian Atlantic Forest, the study evaluates the effectiveness of these technologies in assessing tree diversity and structure.
By combining LiDAR -derived structural attributes—such as canopy height and leaf area index (LAI)—with hyperspectral variables, the research demonstrates the complementary nature of these data sources. The findings reveal that while LiDAR -derived canopy height is a strong predictor of above ground biomass (AGB), the integration of hyperspectral and LiDAR data provides a comprehensive approach to monitoring forest structural attributes and tree diversity. The study supports biodiversity theory, showing that higher species richness enhances biomass capture and canopy functionality.
This whitepaper underscores the critical role UAV-borne remote sensors can play in large-scale forest monitoring, particularly in the context of the UN Decade of Ecosystem Restoration, by providing high-resolution data essential for effective decision-making in restoration projects.