Whitepaper
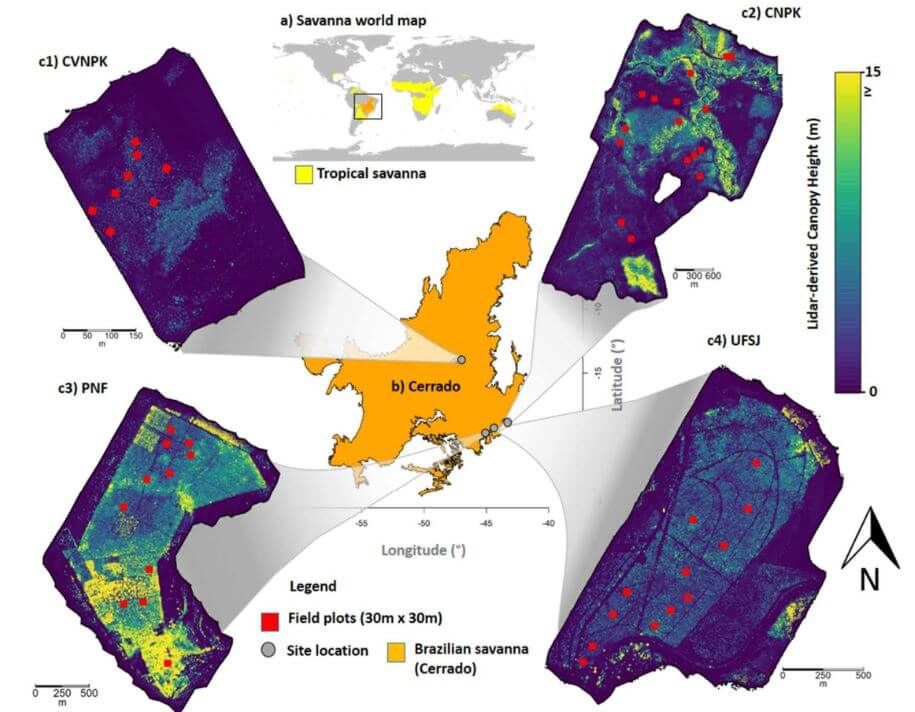
This whitepaper delves into the pivotal role tropical savanna ecosystems play in the global carbon cycle, particularly focusing on the Brazilian Savanna (Cerrado). It examines the uncertain capacity of these ecosystems to store and sequester carbon due to the intertwined effects of human activities and climate change. Utilizing high-density UAV-LiDAR technology, this study provides a comprehensive analysis of the above ground biomass density (AGBt) across diverse vegetation formations in Cerrado, including forests, savannas, and grasslands.
The research highlights the development and validation of regression models to estimate AGBt, emphasizing the model that incorporates vegetation height and cover as the most effective, achieving an adjusted R2 of 0.79. This model was used to map AGBt over a vast area, demonstrating the feasibility and potential of UAV-LiDAR in accurately estimating biomass. Additionally, the study underscores the necessity for improved biomass estimation in grasslands to enhance the understanding of the global carbon balance and support integrated fire management.
The findings presented in this whitepaper provide critical insights and benchmarks for future research, aiming to generate precise biomass maps and inform effective carbon emission mitigation strategies in tropical savanna ecosystems.
This whitepaper investigates the innovative use of UAV-borne hyperspectral and LiDAR data to enhance our understanding of forest ecosystem restoration. Focusing on twelve 13-year-old restoration plots in the Brazilian Atlantic Forest, the study evaluates the effectiveness of these technologies in assessing tree diversity and structure.
By combining LiDAR -derived structural attributes—such as canopy height and leaf area index (LAI)—with hyperspectral variables, the research demonstrates the complementary nature of these data sources. The findings reveal that while LiDAR -derived canopy height is a strong predictor of above ground biomass (AGB), the integration of hyperspectral and LiDAR data provides a comprehensive approach to monitoring forest structural attributes and tree diversity. The study supports biodiversity theory, showing that higher species richness enhances biomass capture and canopy functionality.
This whitepaper underscores the critical role UAV-borne remote sensors can play in large-scale forest monitoring, particularly in the context of the UN Decade of Ecosystem Restoration, by providing high-resolution data essential for effective decision-making in restoration projects.
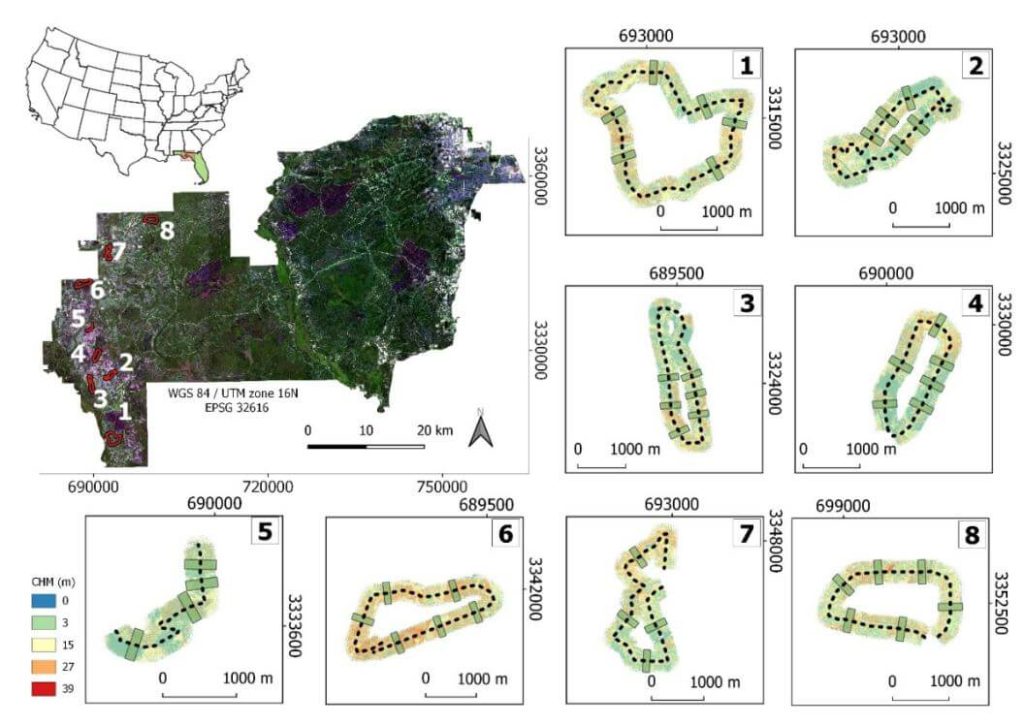
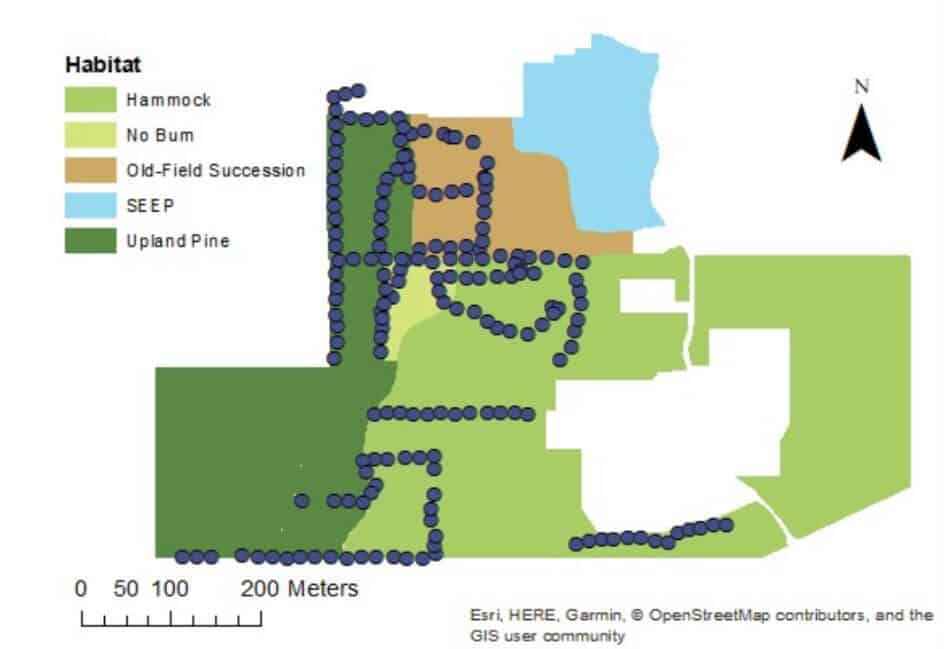
This whitepaper explores the application of high-density UAV-borne LiDAR technology for monitoring understory dynamics in the pine savannas of the southeastern United States, particularly in the context of prescribed fire management. Traditionally, understory characteristics such as height and biomass have been monitored through field sampling, but this study contrasts these conventional methods with advanced remote sensing techniques.
Utilizing the GatorEye UAV system, LiDAR data provided spatially explicit estimates of understory height and biomass before and after a prescribed fire. The results showed significant correlations between LiDAR-derived measurements and traditional field data, demonstrating the accuracy and efficiency of LiDAR technology.
Notably, LiDAR’s comprehensive spatial coverage revealed a smaller biomass reduction after the burn compared to in-situ measurements, highlighting the importance of capturing spatial variability. The findings underscore the potential of LiDAR as a powerful tool for land managers, offering enhanced spatial and temporal resolution in tracking understory biomass and its response to fire, ultimately supporting more effective ecosystem management practices.
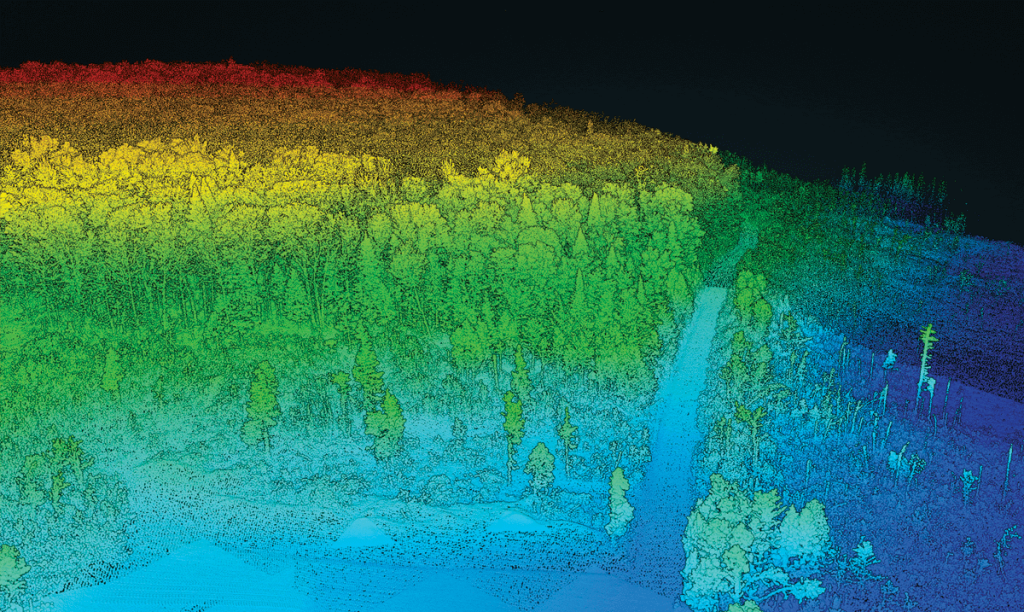
This whitepaper examines the efficiency and accuracy of UAV-borne LiDAR, specifically the GatorEye system, for high-resolution forest data acquisition, comparing it to traditional aircraft-borne LiDAR in the Apalachicola National Forest, USA. The study assesses the effectiveness of single-pass flight plans for generating digital terrain models (DTMs) and canopy height models (CHMs).
Results indicate that DTMs derived from UAV LiDAR showed less than 1 meter difference compared to aircraft-derived DTMs within a 145° field of view (FOV). CHMs provided reliable treetop detection, though tree height underestimations occurred at distances over 175 meters from the flight line. Crown segmentation was effective within a 60° FOV, but shadowing effects hindered its accuracy beyond this range.
The study identifies optimal quality thresholds for various LiDAR products, supporting the development of efficient, cost-effective UAV flight plans for forest monitoring. These findings highlight the potential of UAV-borne LiDAR for detailed, multi-temporal forest structure assessment, offering valuable insights for forest management and conservation strategies.
This whitepaper explores the effectiveness of UAV-borne LiDAR technology for detecting small trails (less than 2.5 meters wide) in mixed forest canopy ecosystems. Accurate trail mapping is crucial for forest management, monitoring, and conservation, yet current sensor technology for sub-canopy detection is still evolving.
The study compares trail detectability using high-definition surface models from UAV LiDAR data and high-resolution satellite imagery from Google Earth. Through participatory mapping, respondents with limited geospatial experience identified trails on both map types. Results showed higher detection rates on the LiDAR-derived map compared to the satellite imagery. In satellite maps, trail detectability was positively correlated with wider trails and lower canopy cover, whereas LiDAR maps showed increased detectability with wider trails regardless of canopy cover.
This mixed-method approach, combining UAV-mounted LiDAR, satellite imagery, and participatory mapping, enhances the rapid detection of small trails under varying conditions, offering valuable insights for improving forest management and conservation efforts.
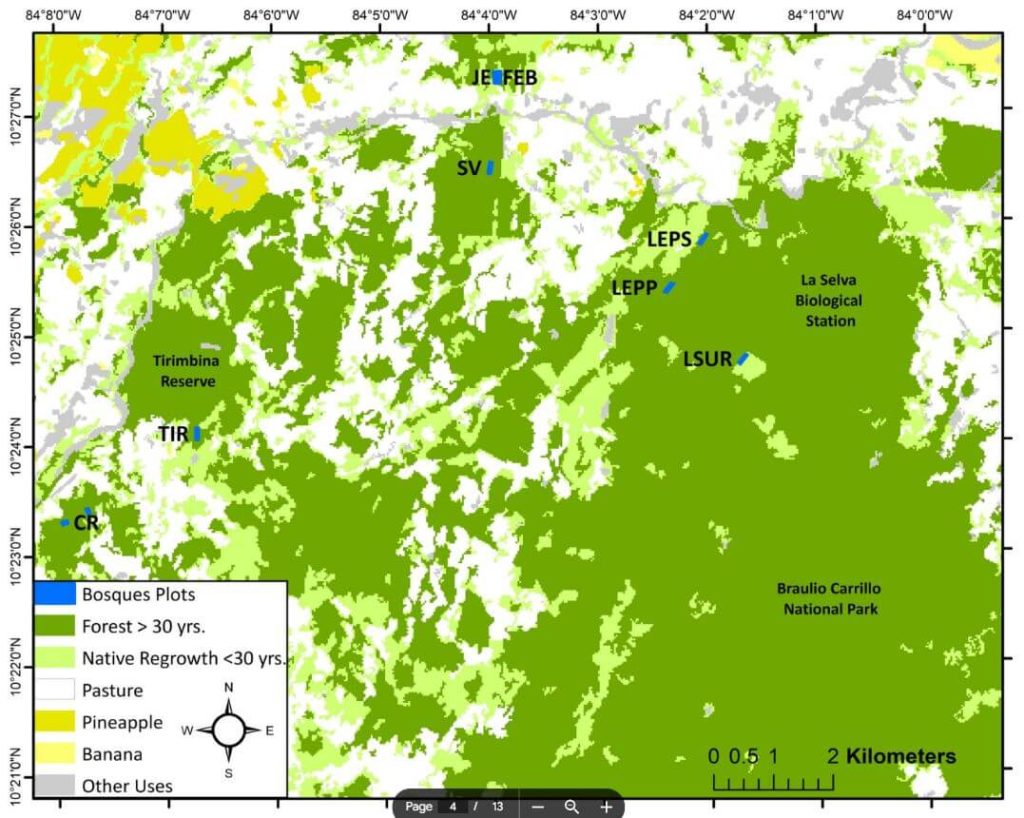
This whitepaper investigates the innovative application of the GatorEye drone-borne LiDAR system for monitoring tropical forest succession through detailed canopy structural attributes. These attributes include canopy height, spatial heterogeneity, gap fraction, leaf area density (LAD) vertical distribution, canopy Shannon index, leaf area index (LAI), and understory LAI.
Focusing on nine tropical forest stands in the Caribbean lowlands of northeastern Costa Rica, the study evaluates the relationship between these variables and aboveground biomass (AGB) stocks and species diversity. The analysis reveals that while canopy height and AGB do not show a clear pattern with forest age, gap fraction and spatial heterogeneity increase, and understory LAI decreases as forests age.
Notably, canopy height is strongly correlated with AGB. The study demonstrates that drone-LiDAR systems significantly enhance the characterization of heterogeneous mosaics created by successional forest patches in human-managed landscapes. This technology offers a valuable tool for improving forest recovery assessments and developing mechanistic carbon sequestration models, crucial for tracking progress within the UN Decade on Ecosystem Restoration.
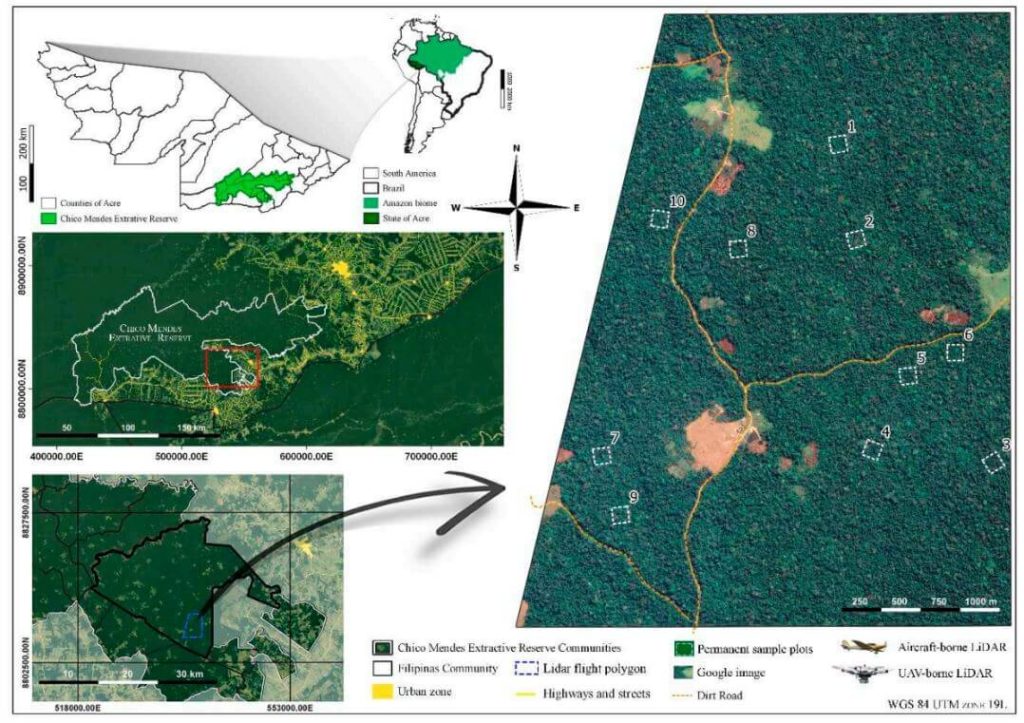
This whitepaper explores the challenges of obtaining high-quality forest structure information in tropical forests, particularly those in difficult-to-access areas. Traditional field-based approaches are often costly and time-consuming, prompting the use of LiDAR technology for efficient and comprehensive structural parameter estimates.
The study compares aboveground biomass (AGB) estimations and products from aircraft-borne LiDAR data collected in 2015 with data from the UAV-borne GatorEye Unmanned Flying Laboratory in 2017 across ten forest inventory plots in the Chico Mendes Extractive Reserve in Acre, southwestern Brazilian Amazon.
Findings indicate that both platforms produce comparable LiDAR products, with the GatorEye system demonstrating higher point density due to its lower and slower flight and increased returns per second. Despite these differences, ground point density remained similar between the systems.
Both sensors yielded analogous results for digital elevation models and estimated AGB. This study validates the effectiveness of UAV-borne LiDAR sensors in accurately quantifying AGB in dense tropical forests and highlights the potential for detailed analyses of crown structure and leaf area density distribution using dense point clouds from UAV systems.
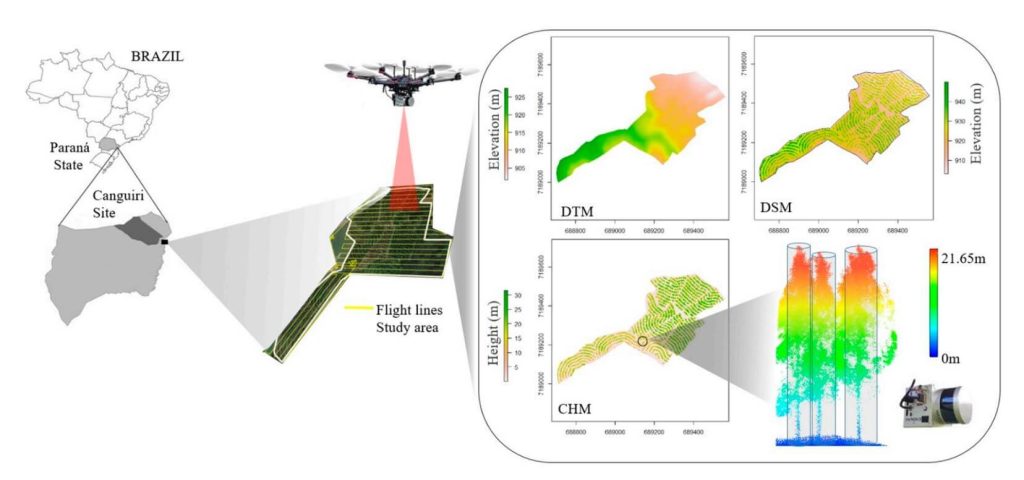
This whitepaper examines the potential of UAV-borne LiDAR technology, specifically the GatorEye system, for measuring essential forest parameters such as diameter at breast height (DBH) and total tree height. Traditionally, these parameters are measured manually using level gauges and hypsometers in sample plots, a process that is laborious, expensive, and spatially limited. Terrestrial laser scanning (TLS) has been used for remote DBH measurement, offering high-density point clouds for accurate inventory but facing spatial limitations due to manual deployment and field access challenges.
The study demonstrates the effectiveness of UAV-LiDAR in providing higher density point cloud data compared to aircraft-borne systems. Focusing on an integrated crop-livestock-forest system with Eucalyptus benthamii plantations, 63 trees were georeferenced and measured in the field. Algorithms typically used for TLS were applied to the UAV-LiDAR point cloud for automatic individual tree detection and measurement.
The UAV-LiDAR-derived DBH and total height showed strong correlations with field measurements, with correlation coefficients of 0.77 and 0.91, and RMSEs of 11.3% and 7.9%, respectively. This study underscores the potential of UAV-LiDAR systems to efficiently measure forest plantations on a broad scale, reducing field effort and enhancing forest management decision-making. Further exploration in diverse tree plantations and forest environments is recommended.
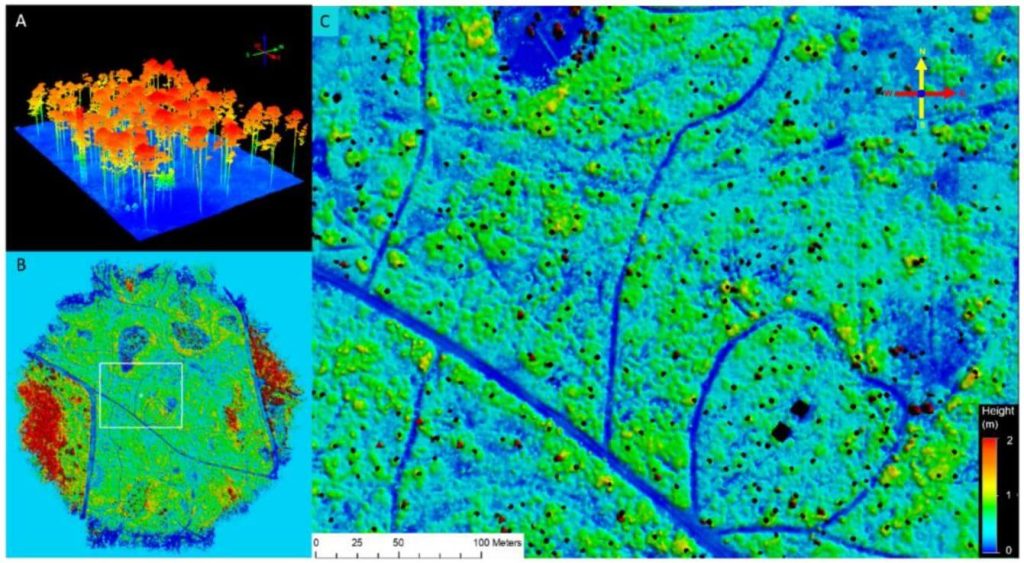
This whitepaper presents groundbreaking insights into the architectural details of the ancient Raleigh Island shell-ring complex (8LV293) on the Gulf Coast of Florida, revealed through drone-mounted, high-resolution LiDAR technology.
Dating back to 900 to 1200 CE, this settlement features at least 37 residential spaces enclosed by oyster shell ridges up to 4 meters tall. Excavations in ten of these spaces uncovered extensive evidence of shell bead production from marine gastropods, highlighting the island’s role in the political economies of second-millennium CE chiefdoms across eastern North America. Unlike other regions where shell bead production was controlled by chiefs, Raleigh Island’s bead making operated independently.
The high-resolution drone LiDAR data allows for unprecedented comparisons of bead production activities across different residential spaces, providing valuable analytical perspectives on the organization of ancient shell bead production. This study underscores the potential of drone-mounted LiDAR in enhancing our understanding of ancient political economies and settlement architectures.