Scout
This whitepaper explores the challenges of obtaining high-quality forest structure information in tropical forests, particularly those in difficult-to-access areas. Traditional field-based approaches are often costly and time-consuming, prompting the use of LiDAR technology for efficient and comprehensive structural parameter estimates.
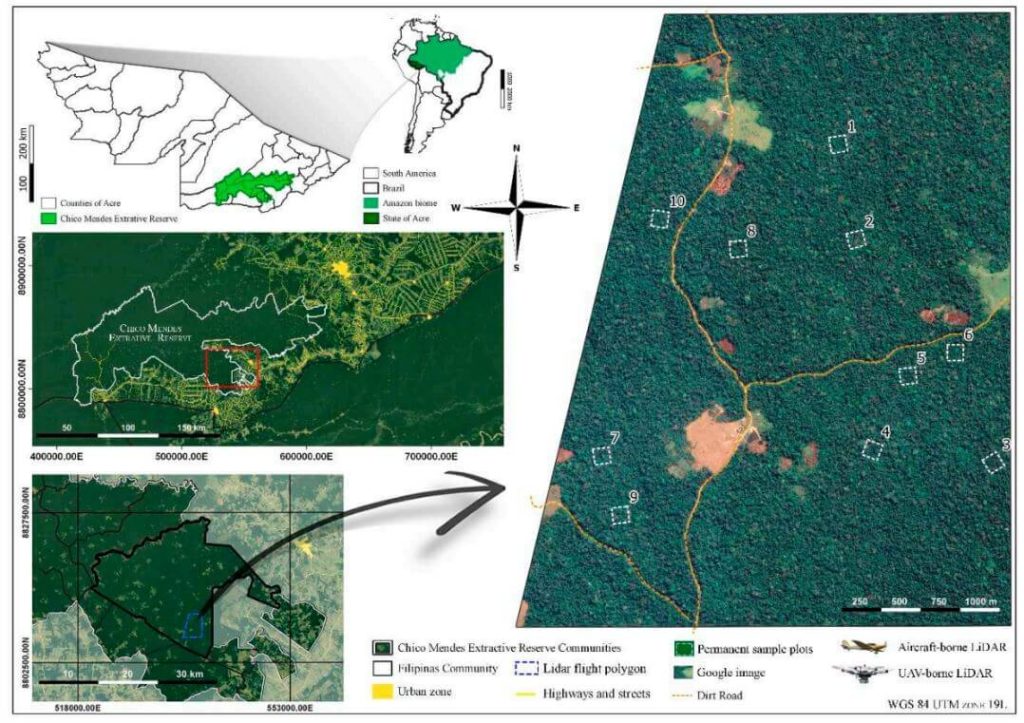
The study compares aboveground biomass (AGB) estimations and products from aircraft-borne LiDAR data collected in 2015 with data from the UAV-borne GatorEye Unmanned Flying Laboratory in 2017 across ten forest inventory plots in the Chico Mendes Extractive Reserve in Acre, southwestern Brazilian Amazon.
Findings indicate that both platforms produce comparable LiDAR products, with the GatorEye system demonstrating higher point density due to its lower and slower flight and increased returns per second. Despite these differences, ground point density remained similar between the systems.
Both sensors yielded analogous results for digital elevation models and estimated AGB. This study validates the effectiveness of UAV-borne LiDAR sensors in accurately quantifying AGB in dense tropical forests and highlights the potential for detailed analyses of crown structure and leaf area density distribution using dense point clouds from UAV systems.
The high dimensionality of data generated by Unmanned Aerial Vehicle(UAV)-Lidar makes it difficult to use classical statistical techniques to design accurate predictive models from these data for conducting forest inventories. Machine learning techniques have the potential to solve this problem of modeling forest attributes from remotely sensed data. This work tests four different machine learning approaches – namely Support Vector Regression, Random Forest, Artificial Neural Networks, and Extreme Gradient Boosting – on high-density GatorEye UAV-Lidar point clouds for indirect estimation of individual tree dendrometric metrics (field-derived) such as diameter at breast height, total height, and timber volume.
Mohawk College recently partnered with the Niagara Parks Commission on a critical project, utilizing their Phoenix LiDAR Scout 32 system to achieve two key objectives. First, they generated a precision high-resolution 3D model of the historic Toronto Power Generation Station. This data is instrumental for the rehabilitation efforts to preserve this architecturally significant structure.
Second, they accurately scanned and geo-located a century-old barge that had been lodged above Niagara Falls since 1918. Dislodged by a powerful storm, the barge moved 150 meters downstream, closer to Horseshoe Falls. Niagara Parks Officials are closely monitoring its potential movement.
UAV LiDAR technology enabled the team to geo-locate the barge with centimeter-level precision and create a detailed cultural heritage preservation model of the power station. This project underscores the critical role of advanced LiDAR technology in historical preservation and environmental monitoring.
Check out their fine work and some incredible footage from the Niagara Falls project here!
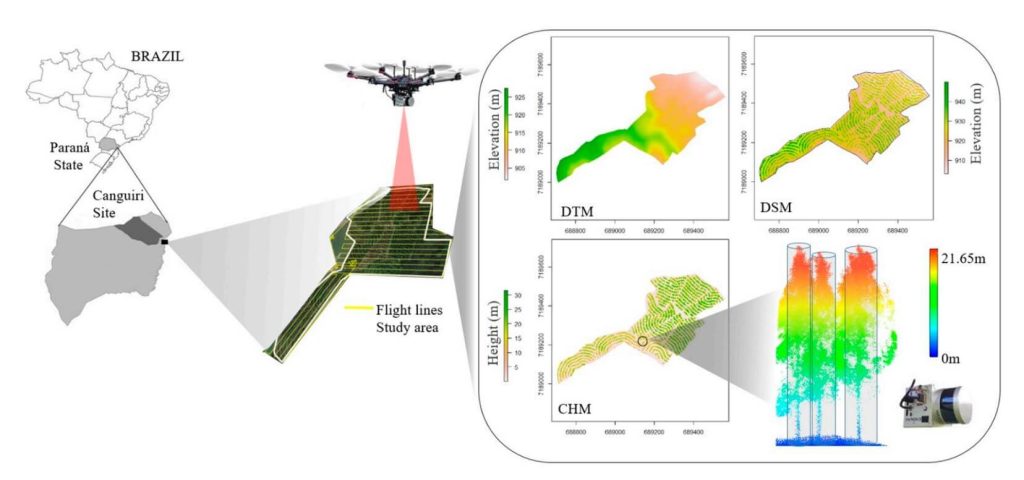
This whitepaper examines the potential of UAV-borne LiDAR technology, specifically the GatorEye system, for measuring essential forest parameters such as diameter at breast height (DBH) and total tree height. Traditionally, these parameters are measured manually using level gauges and hypsometers in sample plots, a process that is laborious, expensive, and spatially limited. Terrestrial laser scanning (TLS) has been used for remote DBH measurement, offering high-density point clouds for accurate inventory but facing spatial limitations due to manual deployment and field access challenges.
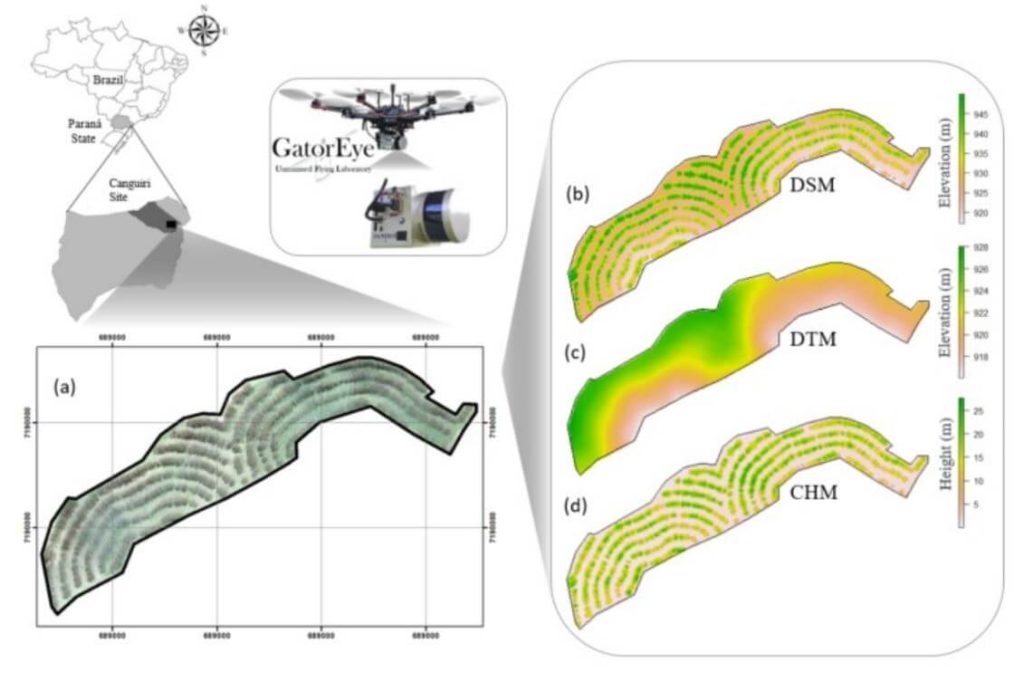
The study demonstrates the effectiveness of UAV-LiDAR in providing higher density point cloud data compared to aircraft-borne systems. Focusing on an integrated crop-livestock-forest system with Eucalyptus benthamii plantations, 63 trees were georeferenced and measured in the field. Algorithms typically used for TLS were applied to the UAV-LiDAR point cloud for automatic individual tree detection and measurement.
The UAV-LiDAR-derived DBH and total height showed strong correlations with field measurements, with correlation coefficients of 0.77 and 0.91, and RMSEs of 11.3% and 7.9%, respectively. This study underscores the potential of UAV-LiDAR systems to efficiently measure forest plantations on a broad scale, reducing field effort and enhancing forest management decision-making. Further exploration in diverse tree plantations and forest environments is recommended.
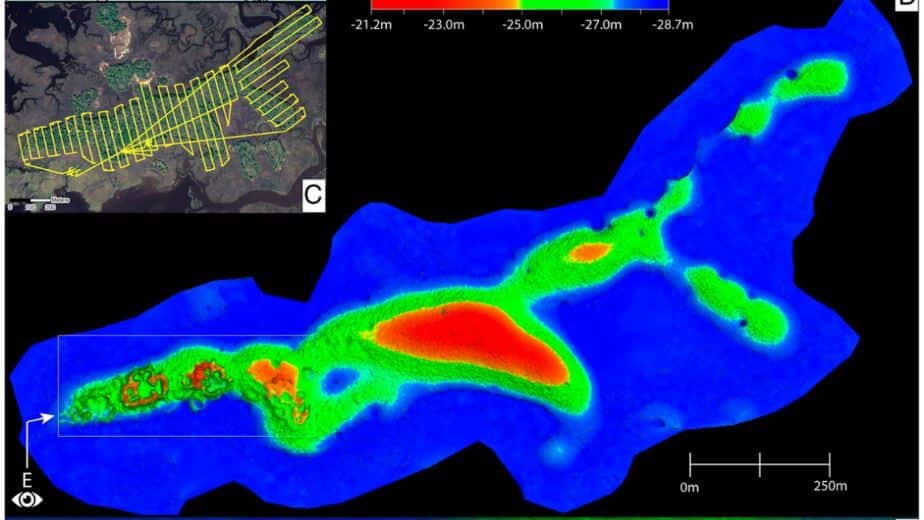
This whitepaper presents groundbreaking insights into the architectural details of the ancient Raleigh Island shell-ring complex (8LV293) on the Gulf Coast of Florida, revealed through drone-mounted, high-resolution LiDAR technology.
Dating back to 900 to 1200 CE, this settlement features at least 37 residential spaces enclosed by oyster shell ridges up to 4 meters tall. Excavations in ten of these spaces uncovered extensive evidence of shell bead production from marine gastropods, highlighting the island’s role in the political economies of second-millennium CE chiefdoms across eastern North America. Unlike other regions where shell bead production was controlled by chiefs, Raleigh Island’s bead making operated independently.
The high-resolution drone LiDAR data allows for unprecedented comparisons of bead production activities across different residential spaces, providing valuable analytical perspectives on the organization of ancient shell bead production. This study underscores the potential of drone-mounted LiDAR in enhancing our understanding of ancient political economies and settlement architectures.
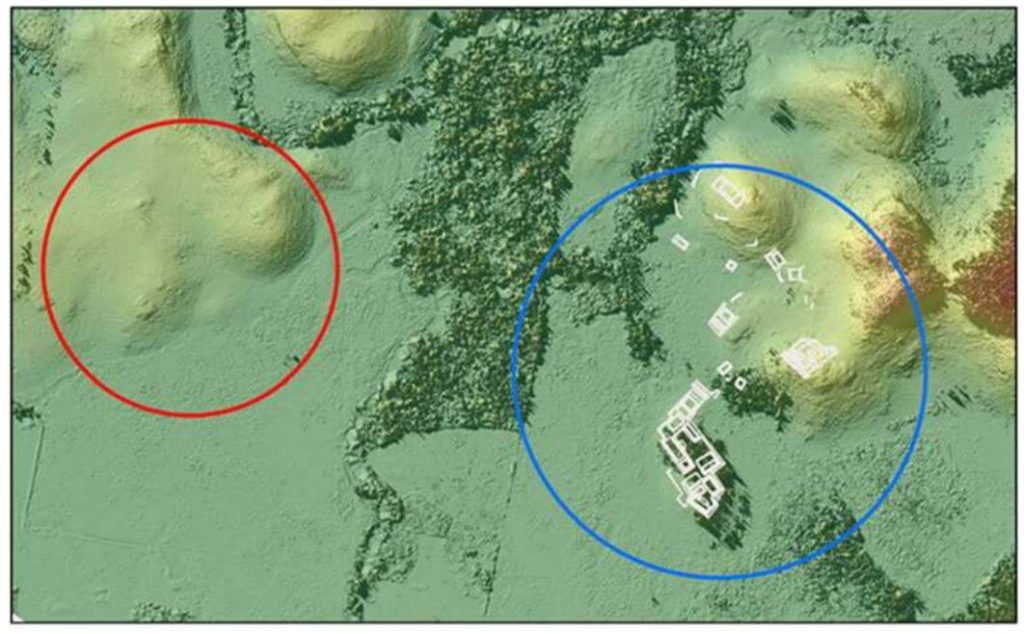
This whitepaper details the use of unmanned aerial vehicle (UAV) LiDAR missions conducted in the Maya Lowlands between June 2017 and June 2018 to develop effective methods, procedures, and standards for drone LiDAR surveys of ancient Maya settlements and landscapes.
Testing at three site locations in the upper Usumacinta River region—Piedras Negras in Guatemala (2017) and Budsilha and El Infiernito in Mexico (2018)—provided a diverse range of natural and cultural contexts to evaluate the technology’s field utility. The study’s results, based on standard digital elevation and surface models, demonstrate the effectiveness of drone LiDAR for documenting ancient landscapes and settlements across the Maya Lowlands and Latin America.
This approach is adaptive, cost-effective, and suitable for targeted documentation, though it requires careful planning and sample evaluation. Future research will further refine the methods and techniques for data filtering and processing.
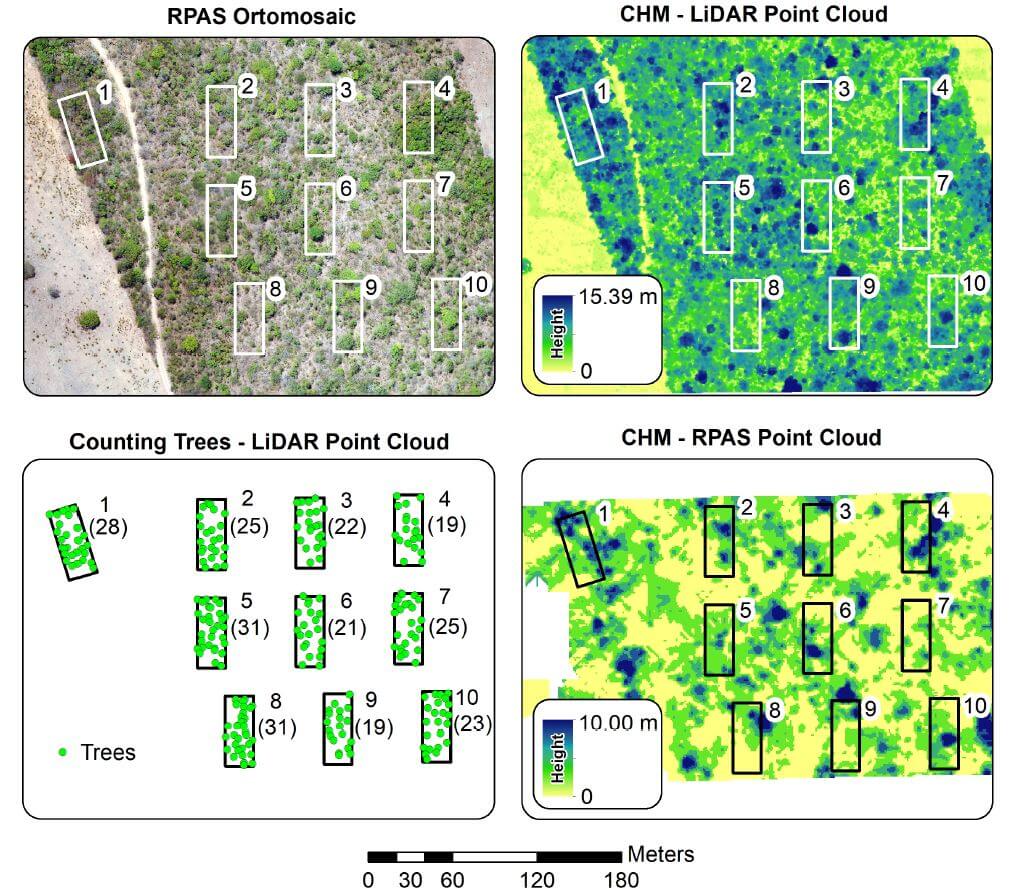
This whitepaper explores the application of Remotely Piloted Aircraft Systems (RPAS) equipped with RGB and LiDAR sensors for monitoring the Brazilian savanna, known as the Cerrado. The Cerrado is the most biologically diverse savanna globally, facing significant threats from anthropogenic activities, necessitating effective environmental policies. This study demonstrates the potential of these advanced sensing technologies for the physical characterization of landscapes within the Cerrado biome.
The research includes analyses of vegetation structure, where the automatic counting of trees was performed. Results indicated that the average tree height measured by RGB sensors was significantly lower than that obtained by LiDAR sensors, highlighting the limitations of Structure from Motion data in densely vegetated landscapes.
The LiDAR data enabled accurate tree counting, with 1,825 trees identified across the study area and 245 within specific ecological study parcels. This paper underscores the effectiveness of RPAS in reducing the costs and time associated with environmental surveys and evaluations, providing crucial insights for the development of conservation policies in the Cerrado.

This whitepaper outlines the objectives and results of a test campaign aimed at evaluating the accuracy of point clouds generated by Phoenix LiDAR Systems in a realistic survey mission scenario. The study also tested the performance of Terrasolid software, running on MicroStation CONNECT Edition, for calibrating and enhancing the data.
Data sets were acquired using a Camflight FX8HL UAS platform and pre-processed into trajectory and point cloud files using Phoenix LiDAR Systems software. The findings demonstrate the effectiveness of these technologies in producing accurate and reliable data for various survey applications, highlighting the potential for improved data calibration and processing with the integrated software solutions.
This report provides valuable insights into the capabilities and performance of UAV-based LiDAR systems for high-precision surveying and mapping tasks.