Scout
Application
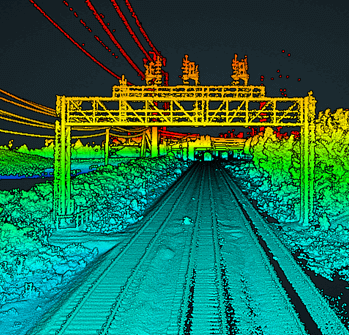
The transportation side of CSX moves multi-million dollar equipment, from oversized generators to military equipment. To ensure the expensive cargo arrives safely to its destination, CSX first scans the planned route to extract cross-sections of bridges, tunnels, and other overhead obstructions from the LiDAR in order to identify clearance hazards prior to transport.
Results
CSX now owns and operates seven Phoenix LiDAR systems. (4) SCOUT-16 systems mounted on high-rail trucks with Ladybug cameras and (3) SCOUT-32 systems permanently installed on the backs of rolling rail cars. The high-rail trucks can travel on both road and railroad with this flexibility enabling them to go anywhere at any time to support immediate business requests. The rail-based geometry cars are designated to travel and cover the entire 21,000+ mile network at least one time per year as part of their safety protection protocol, with LiDAR continuously collecting data.
Parameters
Site: Rail Corridor
Solution: SCOUT-16 & SCOUT-32
AGL: 4 m
Ground Speed: 25-40 mph
Point Density: 800+ ppsm

Speed: 20-40 mph
Point density: thousands of points/m²
AGL: Ground level
Point Density: 50,000+ points per m^2
Height: ~1.5 m AGL
Speed: Walking pace (~3-4 mph)
Data Acquisition Time: 10 minutes
Discover the comprehensive guide to selecting the right LiDAR system with our detailed LiDAR Selection Guide. This article covers everything from the basics of LiDAR technology to in-depth comparisons of current scanners. Learn about the technical specifications, platform configurations, and software considerations essential for optimizing your LiDAR mapping projects.
Whether you are in forestry, construction, or surveying, our guide provides the insights needed to choose the best LiDAR solution for your needs. Read on to understand the advantages of UAV LiDAR, the components that make up a LiDAR system, and how to achieve high precision and accuracy in your mapping endeavors.
Phoenix LiDAR System offers survey-grade LiDAR systems for a variety of industries and applications.

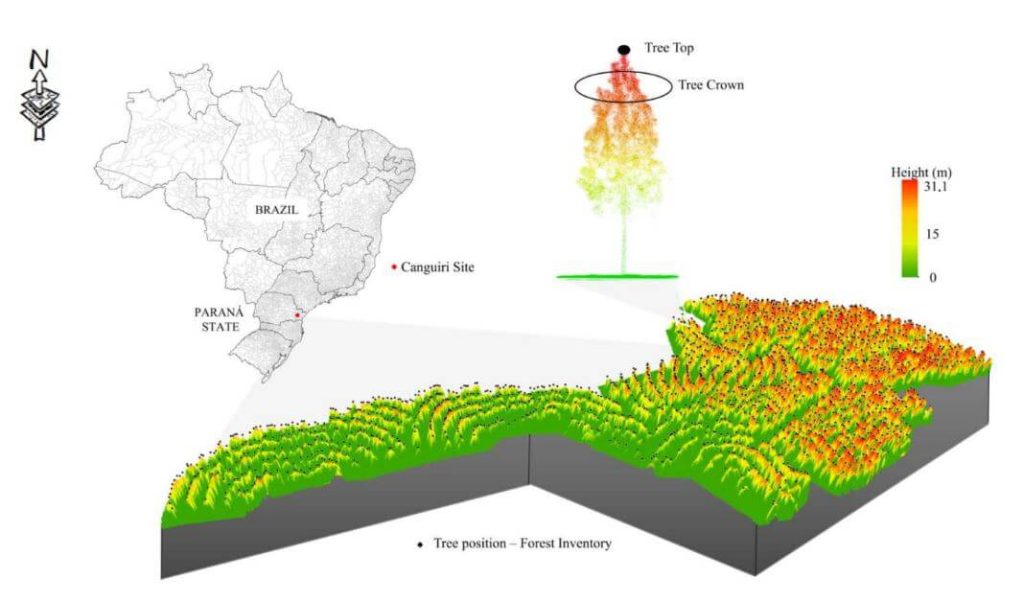
Tropical savanna ecosystems play a critical role in the global carbon cycle, but their ability to store and sequester carbon is uncertain due to the combined effects of anthropogenic activities and climate change. This study explores the potential of UAV LiDAR technology for accurate 3-D mapping of aboveground biomass (AGB) in the Brazilian Savanna (Cerrado).
By assessing five regression models using field sample plots, the research identifies the most effective model for estimating AGB across forest, savanna, and grassland formations. Results indicate that UAV LiDAR can significantly enhance biomass estimation, with notable accuracy across different vegetation types, although further development is needed for grassland biomass estimation.
These findings provide essential data for carbon emission mitigation strategies and support integrated fire management in tropical savanna ecosystems.
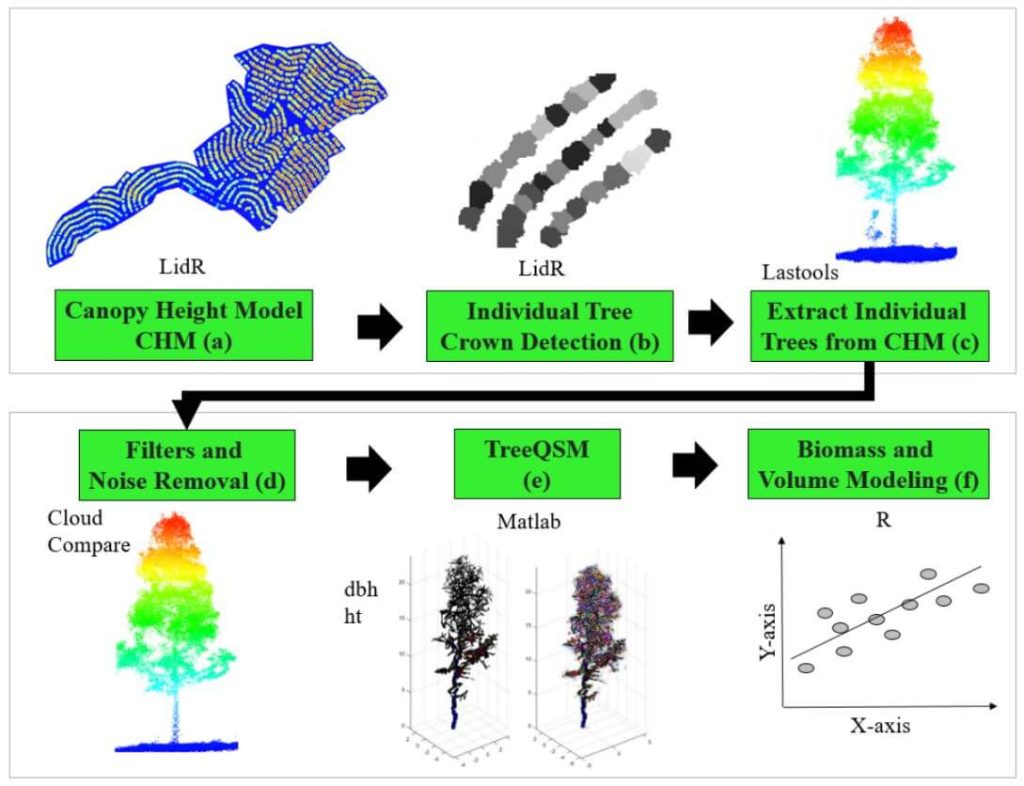
This whitepaper delves into the innovative use of high-density LiDAR data and Quantitative Structure Modelling (QSM) to estimate individual tree attributes, traditionally predicted by field-derived allometric models. Leveraging LiDAR data collected by Unmanned Aerial Vehicles (UAVs), we evaluated the accuracy of QSM in determining key tree metrics such as diameter at breast height (dbh), tree height, volume, and aboveground biomass components (stem, branch, and total).
Our study compares two QSM approaches: integrating QSM-derived dbh and height into field-based equations for volume estimation, and deriving tree volume directly from QSM. Despite a slight overestimation tendency, the models demonstrated satisfactory performance, highlighting QSM’s potential to provide detailed and extensive tree attribute estimates.
This method offers a promising alternative for forest management decision-making, especially in analyzing tree architecture and biomass. The findings underscore the value of UAV-LiDAR and QSM in enhancing the precision and scope of forest attribute assessments.
This whitepaper presents a novel approach to forest inventory within integrated crop-livestock-forest systems using high-density UAV-LiDAR point clouds. Focusing on Eucalyptus benthamii seed forest plantations, we utilized the GatorEye UAV-LiDAR system to compare two forest inventory methods: Sampling Forest Inventory (SFI) with various plot arrangements and Individual Tree Detection (ITD).
By analyzing a point cloud with over 1400 points per square meter, we assessed basal area and volume estimates using both field and LiDAR-measured heights. We compared the number of trees, basal area, and volume per hectare across different scenarios, using statistical analysis to evaluate accuracy and equivalence. Our results show that the SFI approach with a 2300 m² area provides estimates comparable to the ITD method, with minimal error and improved processing efficiency.
This study offers valuable insights for selecting optimal plot sizes in forest inventories, enhancing precision in integrated crop-livestock-forest systems.
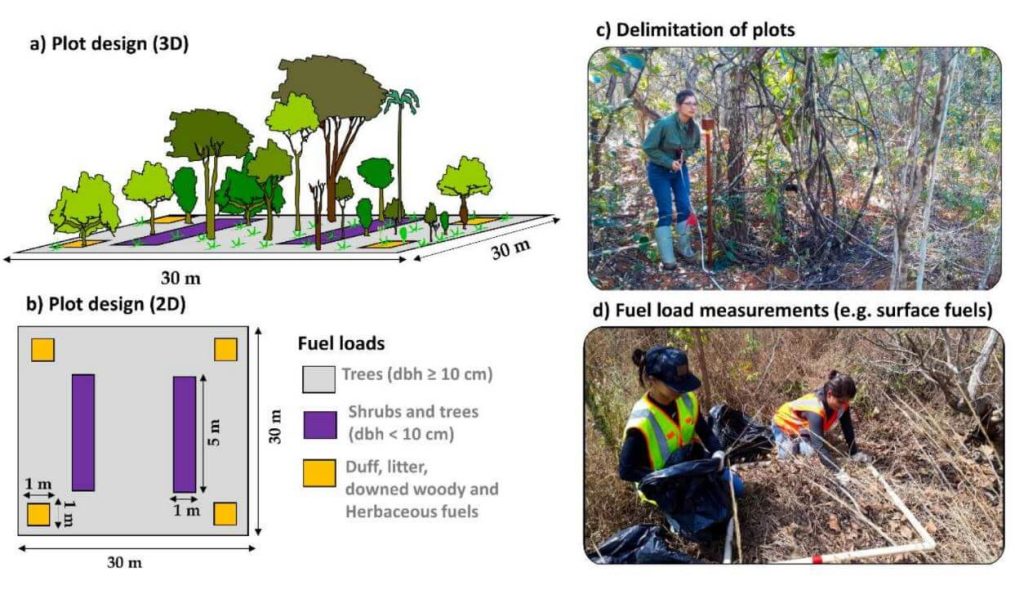
This whitepaper explores a groundbreaking framework for quantifying fuel load in fire-prone regions, focusing on the Brazilian tropical savanna (Cerrado biome), using NASA’s GEDI full-waveform spaceborne LiDAR sensor. Understanding fuel load is crucial for integrated fire management, preserving carbon stock, biodiversity, and ecosystem functioning, and assessing global climate regulation. Traditional remote sensing methods lack the capability to measure vertical vegetation structure accurately.
Our study leverages UAV-collected LiDAR data to simulate GEDI full-waveforms, from which we derive vegetation structure metrics. These metrics are then correlated with field-measured fuel load components using Random Forest models. The resulting models, which predict woody and total fuel loads with high accuracy (R² = 0.88 and 0.71, respectively), provide reliable estimates even for lower strata components.
This innovative approach allows for the creation of fuel load maps for the entire Cerrado and can be extended to other fire-prone regions, enhancing fire management and carbon monitoring efforts. This research showcases the potential of spaceborne LiDAR to revolutionize environmental management and climate initiatives in tropical savannas and beyond.
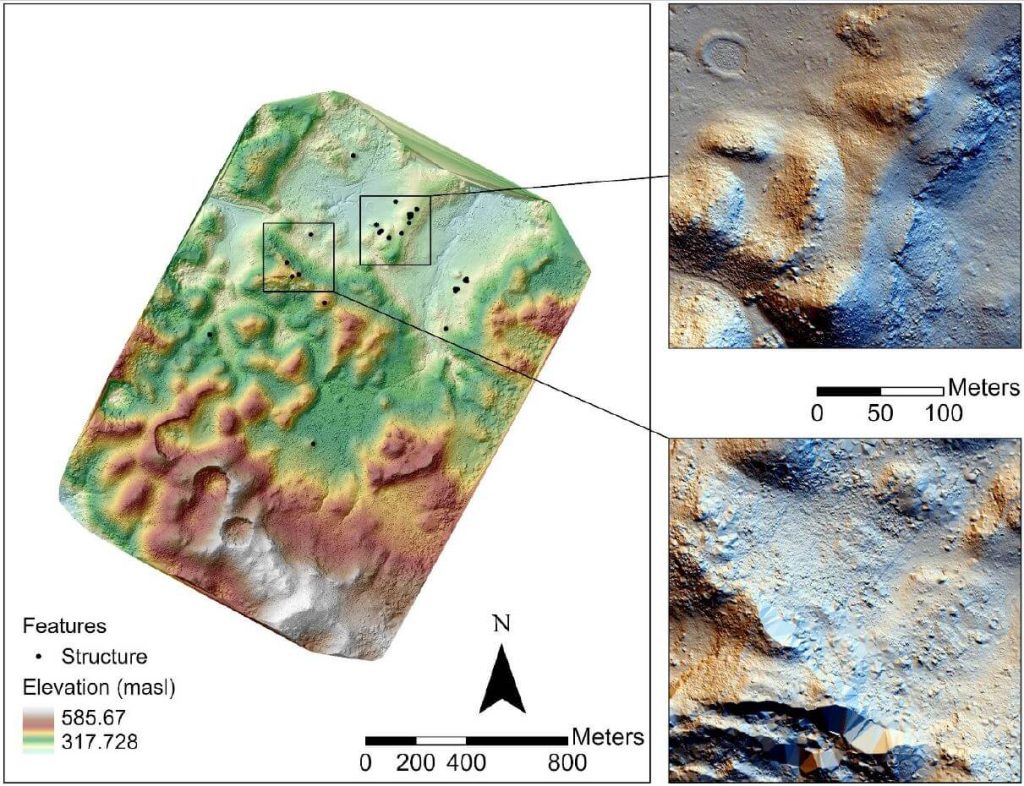
In recent years, airborne laser scanning has revolutionized the documentation of historic cultural landscapes, extending its applications from natural landscapes to built environments. The integration of unoccupied aerial vehicles (UAVs) with LiDAR systems is a transformative advancement, providing complementary data for precise mapping of targeted areas.
This whitepaper presents the findings from a 2019 study in the Maya Lowlands of Chiapas, Mexico, utilizing UAV LiDAR to capture and analyze data from six archaeologically significant areas. These areas, characterized by diverse environments, land cover, and archaeological features, were studied for their pre-Hispanic settlements and agrarian landscapes. The results confirm the immense potential of UAV LiDAR systems for high-precision archaeological mapping and underscore the importance of multidisciplinary collaboration.
The high-precision data acquired is invaluable for mapping archaeological features and understanding long-term land use and landscape changes in archaeological contexts.