Product
Mohawk College recently partnered with the Niagara Parks Commission on a critical project, utilizing their Phoenix LiDAR Scout 32 system to achieve two key objectives. First, they generated a precision high-resolution 3D model of the historic Toronto Power Generation Station. This data is instrumental for the rehabilitation efforts to preserve this architecturally significant structure.
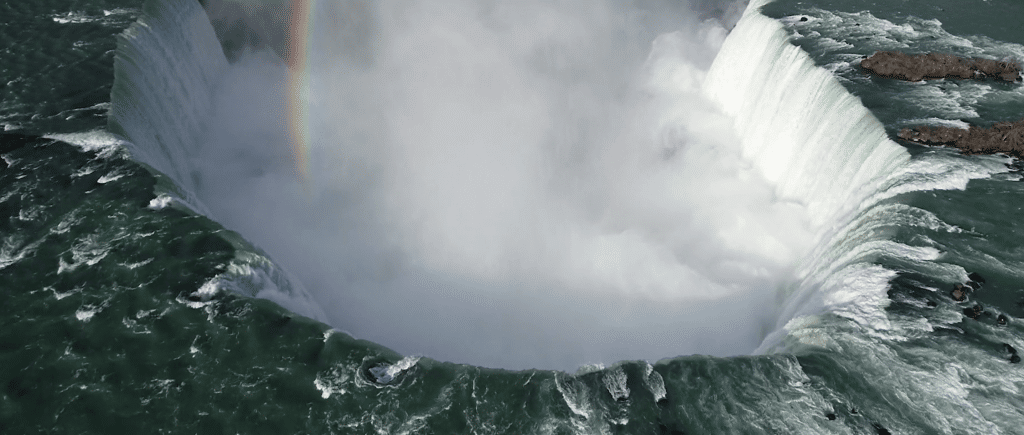
Second, they accurately scanned and geo-located a century-old barge that had been lodged above Niagara Falls since 1918. Dislodged by a powerful storm, the barge moved 150 meters downstream, closer to Horseshoe Falls. Niagara Parks Officials are closely monitoring its potential movement.
UAV LiDAR technology enabled the team to geo-locate the barge with centimeter-level precision and create a detailed cultural heritage preservation model of the power station. This project underscores the critical role of advanced LiDAR technology in historical preservation and environmental monitoring.
Check out their fine work and some incredible footage from the Niagara Falls project here!
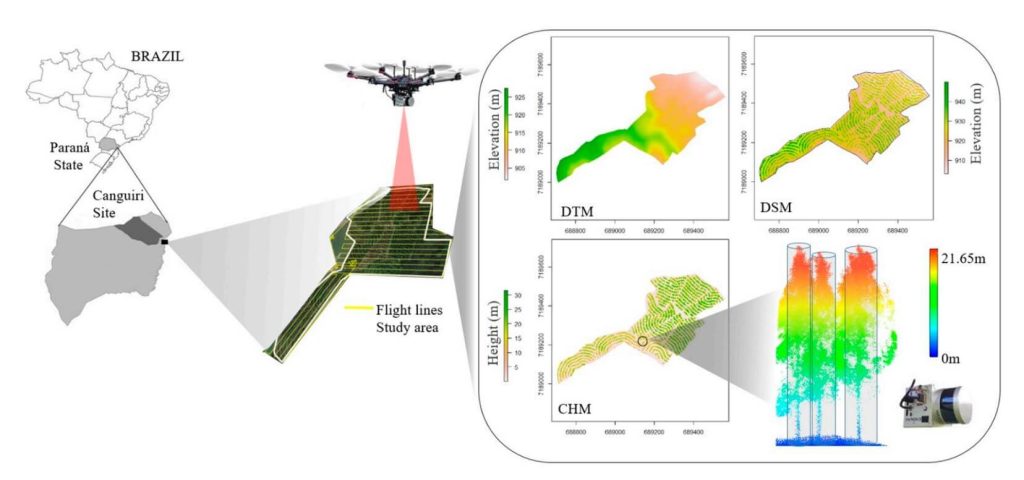
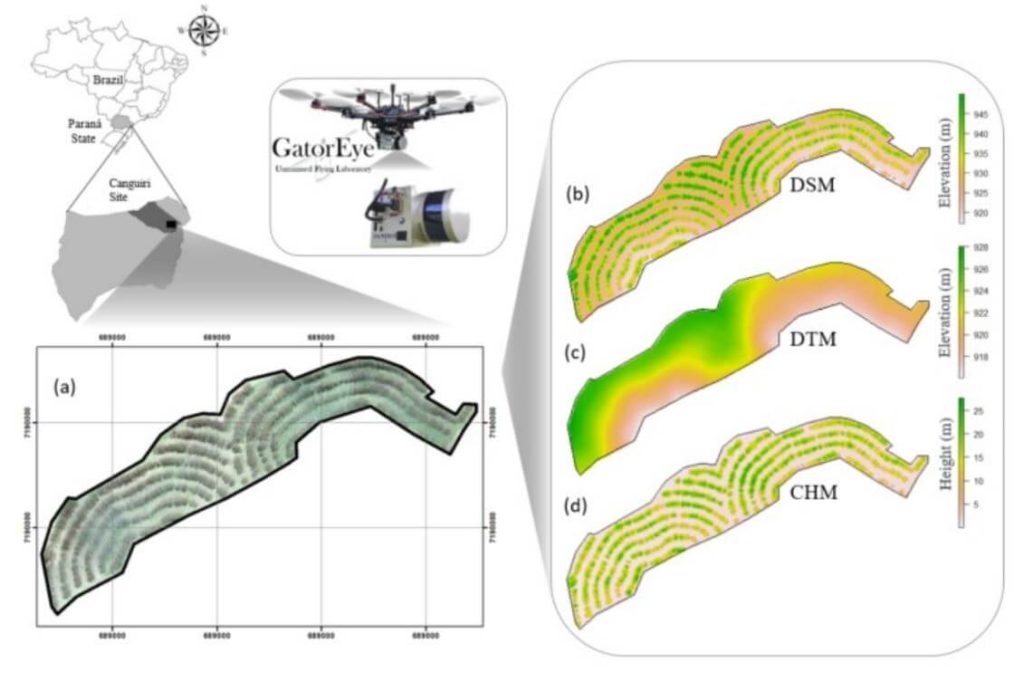
This whitepaper examines the potential of UAV-borne LiDAR technology, specifically the GatorEye system, for measuring essential forest parameters such as diameter at breast height (DBH) and total tree height. Traditionally, these parameters are measured manually using level gauges and hypsometers in sample plots, a process that is laborious, expensive, and spatially limited. Terrestrial laser scanning (TLS) has been used for remote DBH measurement, offering high-density point clouds for accurate inventory but facing spatial limitations due to manual deployment and field access challenges.
The study demonstrates the effectiveness of UAV-LiDAR in providing higher density point cloud data compared to aircraft-borne systems. Focusing on an integrated crop-livestock-forest system with Eucalyptus benthamii plantations, 63 trees were georeferenced and measured in the field. Algorithms typically used for TLS were applied to the UAV-LiDAR point cloud for automatic individual tree detection and measurement.
The UAV-LiDAR-derived DBH and total height showed strong correlations with field measurements, with correlation coefficients of 0.77 and 0.91, and RMSEs of 11.3% and 7.9%, respectively. This study underscores the potential of UAV-LiDAR systems to efficiently measure forest plantations on a broad scale, reducing field effort and enhancing forest management decision-making. Further exploration in diverse tree plantations and forest environments is recommended.
We’re excited to announce the release of LiDARMill v2! LiDARMill v2 takes automated post-processing to the next level. In our recent webinar, we covered some of the new improvements and features including:
- Imagery Processing in LiDARMill
- Ground Control Reporting and Adjustments
- Robust Coordinate System Handling
- A Workflow Overview and Demonstration
- Multi-Mission Processing Support
- Advanced Point Cloud Filtering Options
- RGB Thermal & Fusion
- Accuracy Reporting
- Automated LiDAR and Camera Calibration Options
- Near-Real Time (NRT) Reference Station Positioning for Projects Requiring Less Than 24 Hour Turn-around Time
- Trajectory Post-Processing Without Reference Stations
If you have any questions or would like to learn more about LiDARMill v2, please don’t hesitate to get in touch. We’d be happy to help!

We’re happy to announce the release of SpatialSuite 5.0! Make sure to check out our webinar led by Post Processing Manager, Conrad Conterno, to learn about the many, powerful new tools and features. In this webinar we cover:
- The .cloud format
- LiDARSnap Plugin
- CameraSnap Plugin
- Classification/Point Filtering Plugin
- Exporting Vector and Raster Products
- System Visualization Tools
- Other New Features (i.e. RXP to SDCX converter, LAS Viewer, and more.)
If you have any questions or would like to learn more about SpatialSuite 5.0, please don’t hesitate to get in touch. We’d be happy to help!
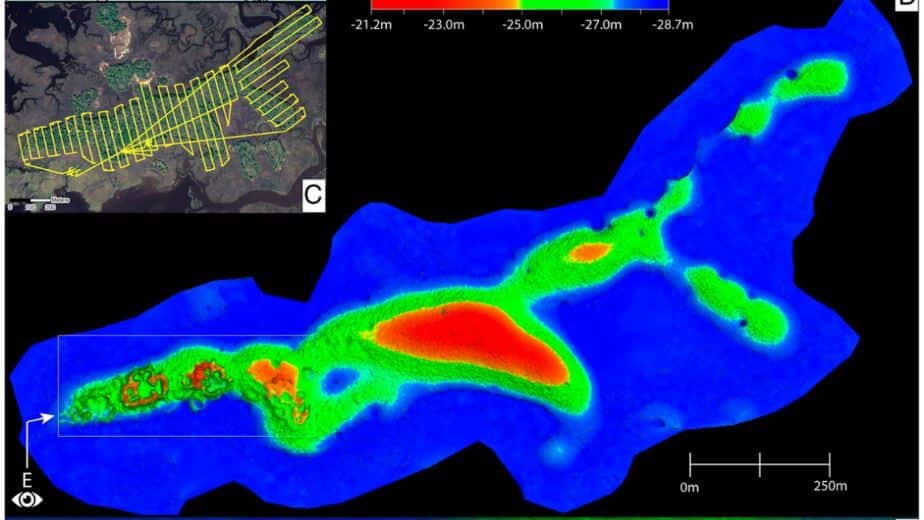
This whitepaper presents groundbreaking insights into the architectural details of the ancient Raleigh Island shell-ring complex (8LV293) on the Gulf Coast of Florida, revealed through drone-mounted, high-resolution LiDAR technology.
Dating back to 900 to 1200 CE, this settlement features at least 37 residential spaces enclosed by oyster shell ridges up to 4 meters tall. Excavations in ten of these spaces uncovered extensive evidence of shell bead production from marine gastropods, highlighting the island’s role in the political economies of second-millennium CE chiefdoms across eastern North America. Unlike other regions where shell bead production was controlled by chiefs, Raleigh Island’s bead making operated independently.
The high-resolution drone LiDAR data allows for unprecedented comparisons of bead production activities across different residential spaces, providing valuable analytical perspectives on the organization of ancient shell bead production. This study underscores the potential of drone-mounted LiDAR in enhancing our understanding of ancient political economies and settlement architectures.
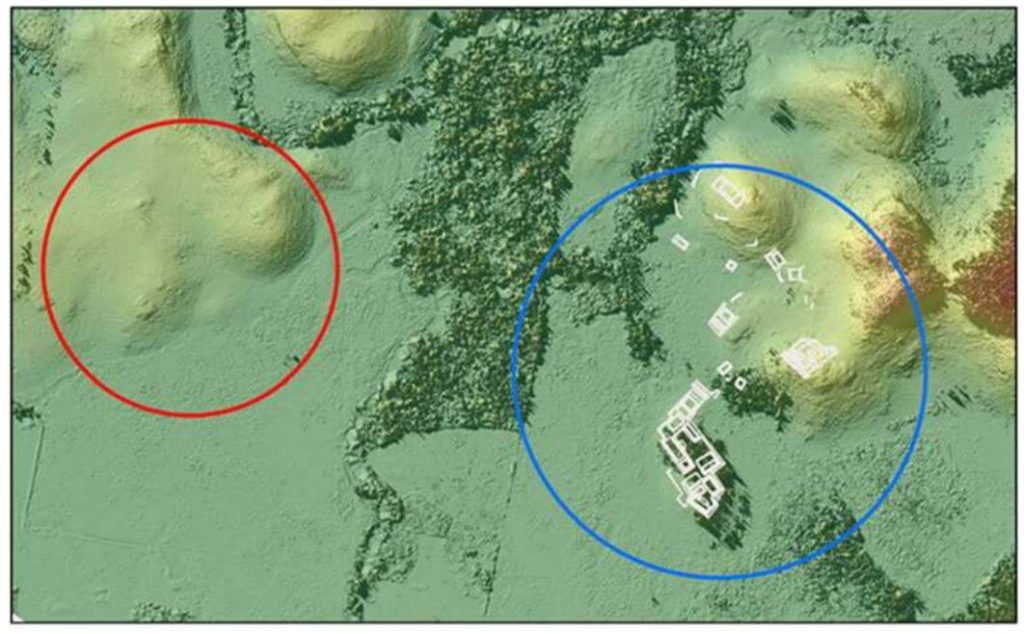
This whitepaper details the use of unmanned aerial vehicle (UAV) LiDAR missions conducted in the Maya Lowlands between June 2017 and June 2018 to develop effective methods, procedures, and standards for drone LiDAR surveys of ancient Maya settlements and landscapes.
Testing at three site locations in the upper Usumacinta River region—Piedras Negras in Guatemala (2017) and Budsilha and El Infiernito in Mexico (2018)—provided a diverse range of natural and cultural contexts to evaluate the technology’s field utility. The study’s results, based on standard digital elevation and surface models, demonstrate the effectiveness of drone LiDAR for documenting ancient landscapes and settlements across the Maya Lowlands and Latin America.
This approach is adaptive, cost-effective, and suitable for targeted documentation, though it requires careful planning and sample evaluation. Future research will further refine the methods and techniques for data filtering and processing.
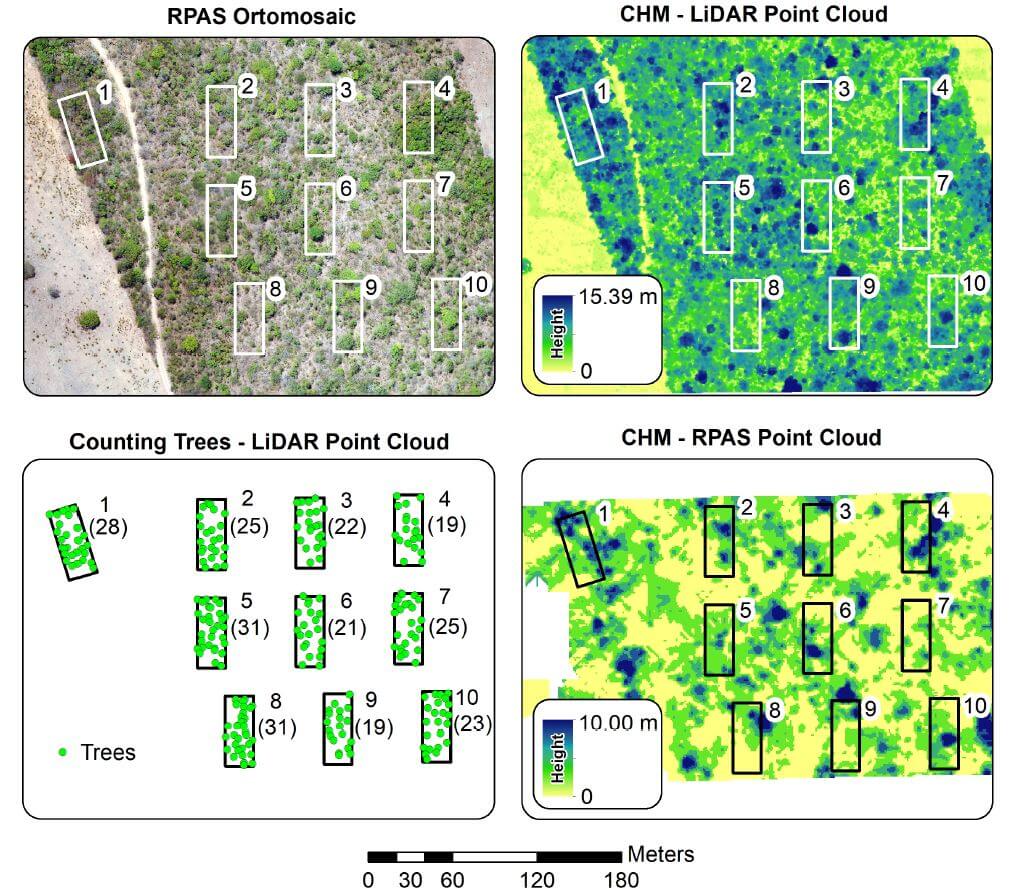
This whitepaper explores the application of Remotely Piloted Aircraft Systems (RPAS) equipped with RGB and LiDAR sensors for monitoring the Brazilian savanna, known as the Cerrado. The Cerrado is the most biologically diverse savanna globally, facing significant threats from anthropogenic activities, necessitating effective environmental policies. This study demonstrates the potential of these advanced sensing technologies for the physical characterization of landscapes within the Cerrado biome.
The research includes analyses of vegetation structure, where the automatic counting of trees was performed. Results indicated that the average tree height measured by RGB sensors was significantly lower than that obtained by LiDAR sensors, highlighting the limitations of Structure from Motion data in densely vegetated landscapes.
The LiDAR data enabled accurate tree counting, with 1,825 trees identified across the study area and 245 within specific ecological study parcels. This paper underscores the effectiveness of RPAS in reducing the costs and time associated with environmental surveys and evaluations, providing crucial insights for the development of conservation policies in the Cerrado.

This whitepaper presents the initial results from testing and evaluating a single-rotary Unmanned Aircraft System (UAS) integrated with a long-range, multi-return LiDAR sensor. Conducted at an airfield in South Texas, USA, the study explores the evolving capabilities of miniaturized LiDAR technology and its application in UAS platforms. Compared to traditional airborne LiDAR mapping, UAS platforms offer greater flexibility in flight design, rapid response capabilities, and potentially lower costs for local mapping.
The research focuses on describing the UAS platform and its enabling technologies (LiDAR, IMU, GPS), sensor calibration and initialization processes, and the methods for geospatial surveying, data processing, and analysis. The advantages of LiDAR, such as its pulsed ranging technique and multi-return detection capability, are highlighted, demonstrating its effectiveness in applications like vegetation structure monitoring, obstacle detection, and digital terrain model refinement.
This study underscores the potential of UAS LiDAR systems for fine-scale mapping and various environmental monitoring applications, paving the way for enhanced precision and efficiency in geospatial data collection.