ResourceType

Safer and Faster, Higher Resolution, Survey Grade Accuracy
Use Case: How UAV-based LiDAR Has Transformed the Surveying Industry
Company: Pape-Dawson Engineers
Challenge
Pape-Dawson Engineers is the largest civil engineering firm headquartered, and exclusively located, in Texas with a staff of over 850 employees. Their team of professionals provide civil engineering, surveying, GIS, and environmental services for land development, transportation, and water resources projects for both private and public clients.
Pape-Dawson’s surveyors and engineers are faced with demanding projects with fast turnaround times. Daily challenges include mapping densely vegetated GNSS denied sites with line-of-site obstructions, access issues, and large scale sites requiring a daunting number of detailed feature measurements – to name a few.
Solution
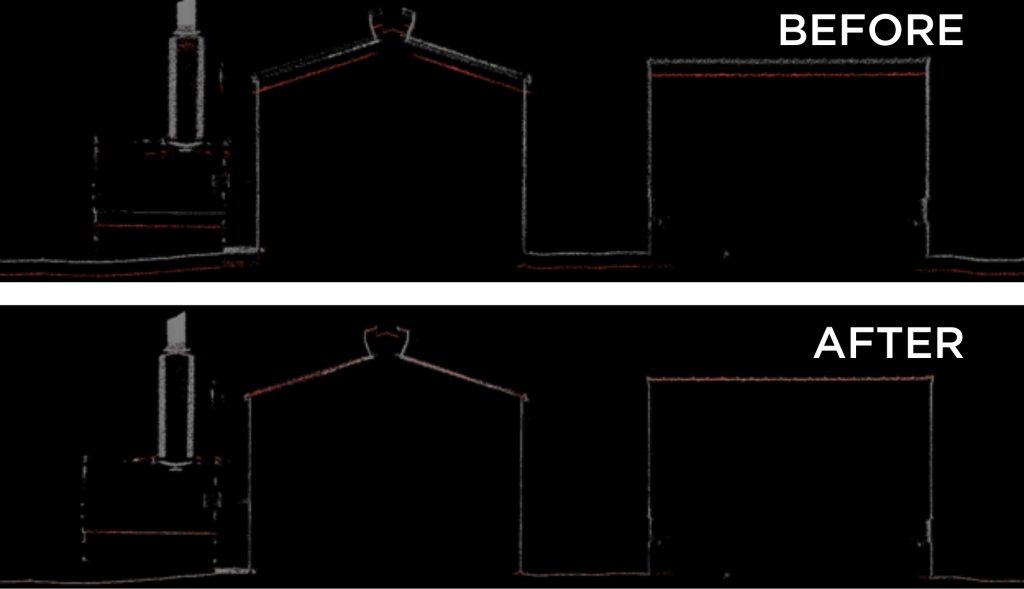
The Pape-Dawson team leverages the power of UAV-based LiDAR to safely and efficiently perform existing conditions topographic surveys. Using the Phoenix LiDAR RANGER-LITE, the team can densely collect site measurements in 1 day compared to weeks on the ground using conventional surveying methods. The enhanced resolution of the lidar data adds the value of unparalleled feature extraction.
“The wealth of data in the point cloud, no matter what you’re pulling from it, is definitely our greatest source of value.”
David Trotter
Pape-Dawson Engineers, Geospatial Specialist, Chief Pilot
Application
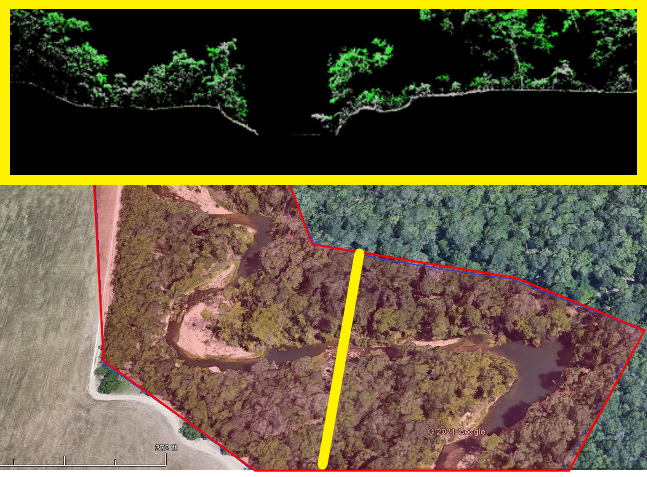
Pape-Dawson mapped two miles of riverbank for a client interested primarily in the features at the top of the bank on one side. Their team mapped the site within 45 minutes leveraging the UAV-based RANGER-LITE system. They collected the river bank of interest as well as the other bank, and even captured the exposed river bed features. Their team delivered the necessary data deliverables in two days, while simultaneously working on other projects.
Results
Heavily vegetated sites used to take Pape-Dawson’s surveyors several days to cut line through vegetation in preparation for data collection. Now, the team let’s the RANGER-LITE do the heavy lifting, mapping large scale and complex vegetated sites in under an hour. Accurate existing conditions surveys are critical, especially as it pertains to mass grading or dirt quantity calculations projects. They now capitalize on the enhanced resolution and accuracy provided by the RANGER’s LiDAR data for faster and more accurate quantity takeoffs, saving their team time and saving their customers money.

PARAMETERS
Scope: 2 mile river corridor
Acquisition Time: 45 minutes
Processing Time: 2 days

Quick Turnaround Time, Massive Data Collection, Tight Weather Window
Use Case: Implementing LiDAR in Pipeline Surveys Expands Project Scope Capabilities for MSI
Company: Measurement Sciences Inc.
Challenge
MSI, Inc. leverages lidar technology in the oil and gas industry by expanding their project scopes and increasing the number of completed surveys within the short fair-weather window between snowmelt to snowfall.
They implement lidar in pipeline surveys to be able to show a grander scope of the river crossing and banks. LiDAR enables their team to produce a much more detailed pipeline profile than traditional methods (i.e. taking gridded shots every 5 meters with GNSS), and offers expanded client deliverable offerings.

Solution
MSI, Inc. leverages lidar technology in the oil and gas industry by expanding their project scopes and increasing the number of completed surveys within the short fair-weather window between snowmelt to snowfall.
They implement LiDAR in pipeline surveys to be able to show a grander scope of the river crossing and banks. LiDAR enables their team to produce a much more detailed pipeline profile than traditional methods (i.e. taking gridded shots every 5 meters with GNSS), and offers expanded client deliverable offerings.
Application
MSI, Inc. leverages LiDAR technology in the oil and gas industry by expanding their project scopes and increasing the number of completed surveys within the short fair-weather window between snowmelt to snowfall.
They implement lidar in pipeline surveys to be able to show a grander scope of the river crossing and banks. LiDAR enables their team to produce a much more detailed pipeline profile than traditional methods (i.e. taking gridded shots every 5 meters with GNSS), and offers expanded client deliverable offerings.

Results
MSI, Inc. owns and operates three Phoenix LiDAR systems: the MiniRANGER-1, RANGER-LR, and RANGER-XL. Their best collection windows are early spring and late fall, so they try to group as many sites together as possible to map consecutively during two sizeable RANGER-XL helicopter campaigns each year. They deploy the UAS-based miniRANGER to supplement sites between those two collection windows. This keeps the cost of helicopter operations down and still enables MSI to collect sites on demand, if needed, rather than waiting for the two seasonal windows. The decision process for which Phoenix system to deploy varies site by site – depending on time of year, project scope, and strictness of deliverable timelines.

High Point Density, High Accuracy, High Measurement Range
Use Case: Mapping the Rocky Mountain Foothills with the Helicopter-Mounted RANGER Series
Company: SkySkopes
Challenge
SkySkopes is a professional service provider with a highly qualified operations and geospatial team. They operate a wide variety of advanced sensors and aircraft for transmission and distribution line inspections, oil and gas applications, and many other innovative use cases that focus on adding value.
The challenge was finding a solution that could be adaptable to unmanned aircraft, rotorcraft, and fixed wing platforms.
“SkySkopes utilizes unmanned aircraft, rotorcraft, fixed wing, and mobile platforms. One of the benefits of Phoenix LiDAR systems is the ability to use the same sensor on multiple platforms.”
Eric Goetsch, VP of Helicopter Operations, R&D

Solution
One of the benefits of Phoenix LiDAR systems is the ability to use the same sensor on multiple platforms. With the purchase of the RANGER-XL system, SkySkopes could bid on fixed wing, rotorcraft, and UAV based projects.
Benefits
- Ability to fly high and fast, without sacrificing point density
- Efficiently collects high precision, high accuracy data
- Adaptable to a wide variety of vehicle platforms
- Turn Key operation
“We have been able to bid on and win numerous projects just based off of our RANGER-XL LiDAR system. Being able to utilize that system in such a variety of project types and industries allows for a faster return on investment.”
Eric Goetsch – VP of Helicopter Operations, R&D
Acquisition
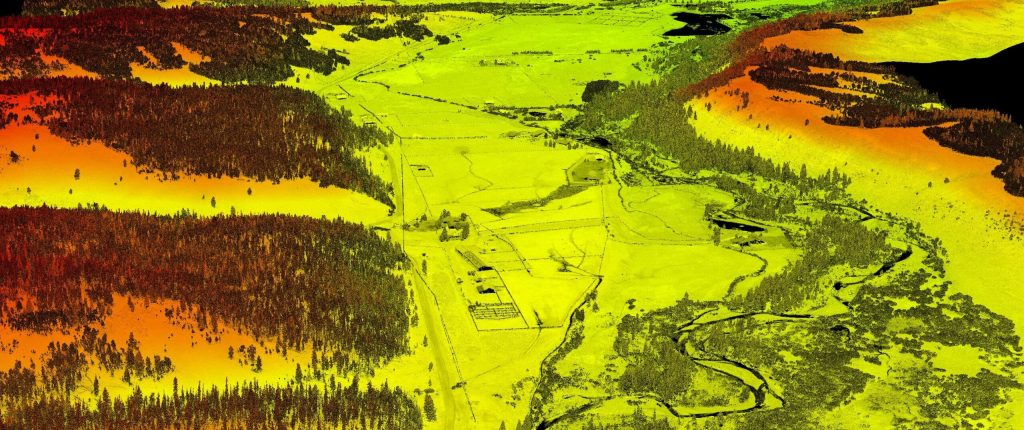
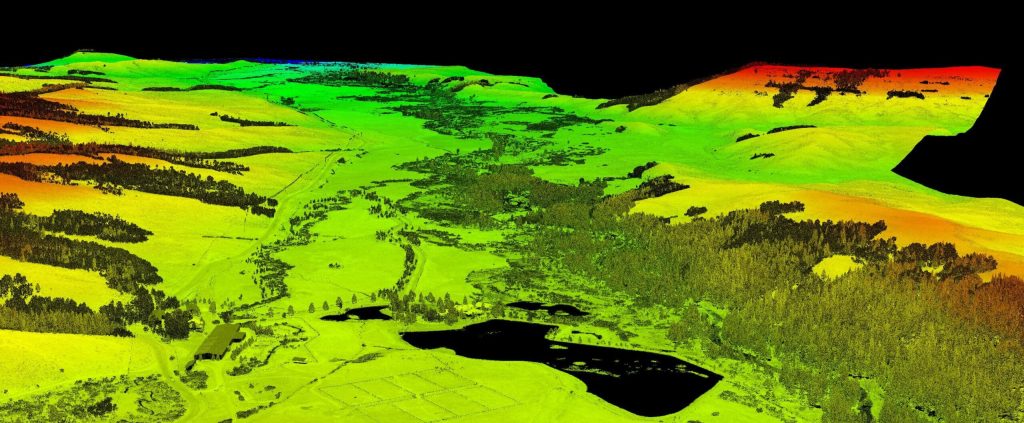
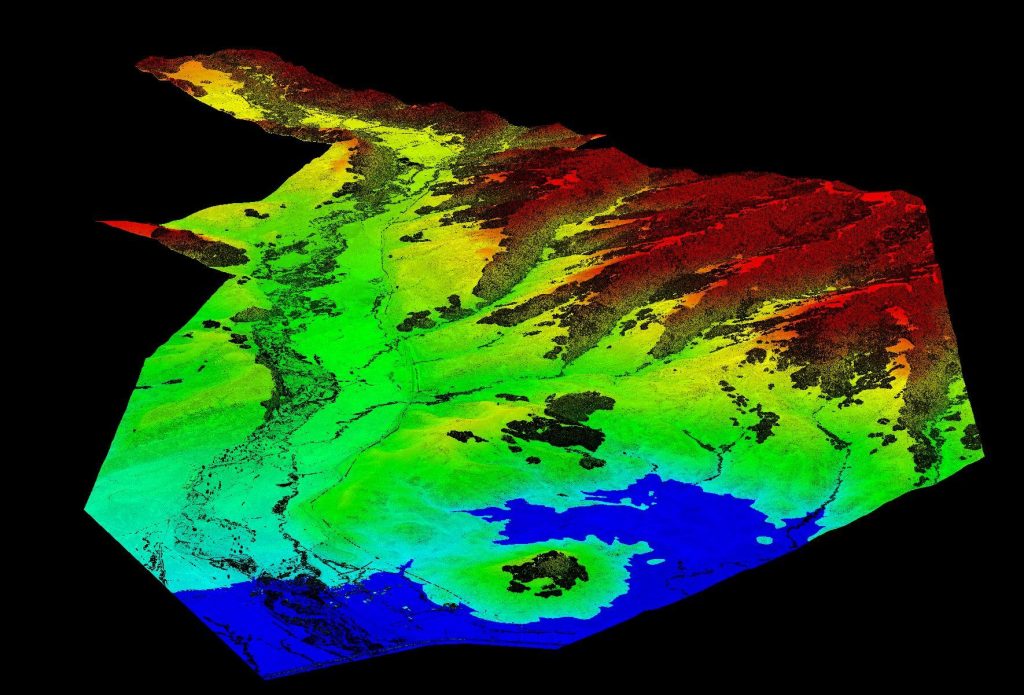
SkySkopes completed a wide area mapping pre-construction survey in the foothills of the Rocky Mountains with a scope of 12,000 acres. Taking the size of the project into consideration, as well as the complex and challenging mountainous terrain, their team selected a Bell 407 helicopter with a RANGER-XL. The RANGER-XL’s long ranging capability allowed the team to safely and efficiently collect data at 1,200ft above the ground, flying at a ground speed of 60 knots, all while meeting and exceeding the project’s point density requirement of 30 points per square meter.
Results
The SkySkopes team has reliably bid on and won numerous projects based off of the capabilities of their RANGER-XL LiDAR system. Utilizing the RANGER-XL solution in a variety of project types and industries allowed for a faster return on investment. Leveraging the ranging capabilities of the RANGER-XL combined with the endurance of the Bell 407, enables their team to safely, efficiently, and reliably map large areas while penetrating dense foliage.
PARAMETERS
Site: 2,000-acre pre-construction survey in the foothills of the Rocky Mountains
Solution: RANGER XL + Bell 407 Helicopter
AGL: 1200ft
Point Density: 30 points per square meter
Time: 5 hours
High Point Density, High Accuracy, Vehicle Adaptability
Use Case: Fusing Aerial and Mobile LiDAR Data
Company: Caltech Group
Challenge
Companies looking to perform large scale, high resolution mapping projects with budget restrictions and time constraints struggle using traditional surveying methods.
Caltech’s team of surveyors, engineers, CAD experts, technologists, and GIS specialists has spent the last 30+ years becoming Western Canada’s go-to company for geomatics services. Caltech provides services to many oil & gas utility clients. These clients demand some of the highest standards pertaining to data quality.
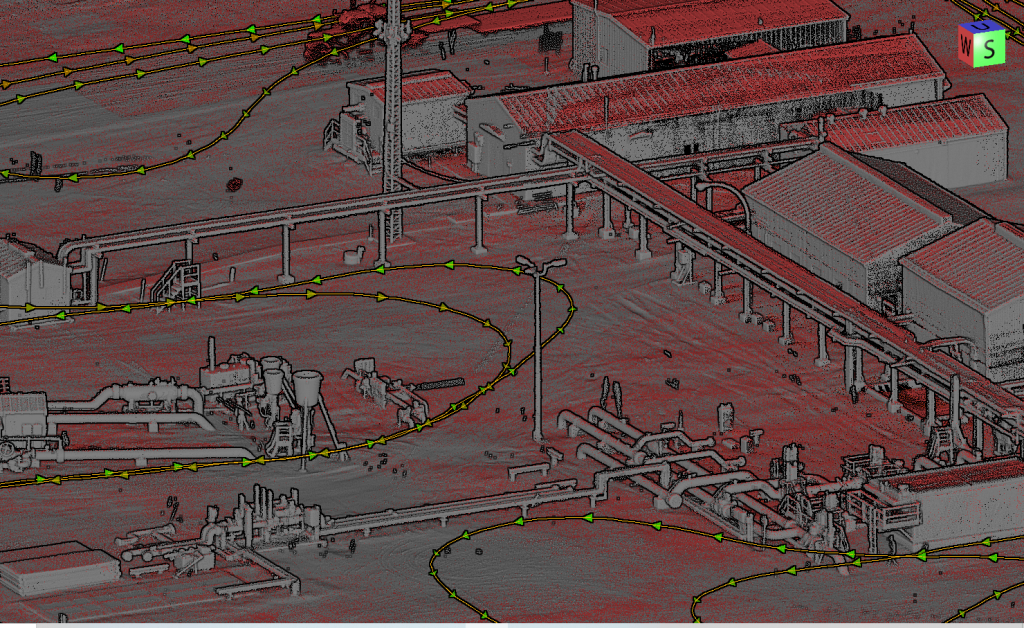
Caltech was contacted to generate a facility as-built of a site consisting of a myriad of pipes, buildings, and equipment. Using the mapping tools on hand, it would have been very difficult to complete the project, at least not to the level of accuracy that would be useful to the client. The only tool that could have been used was a terrestrial laser scanner, but due to the size of the facility – it was just not feasible.

Solution
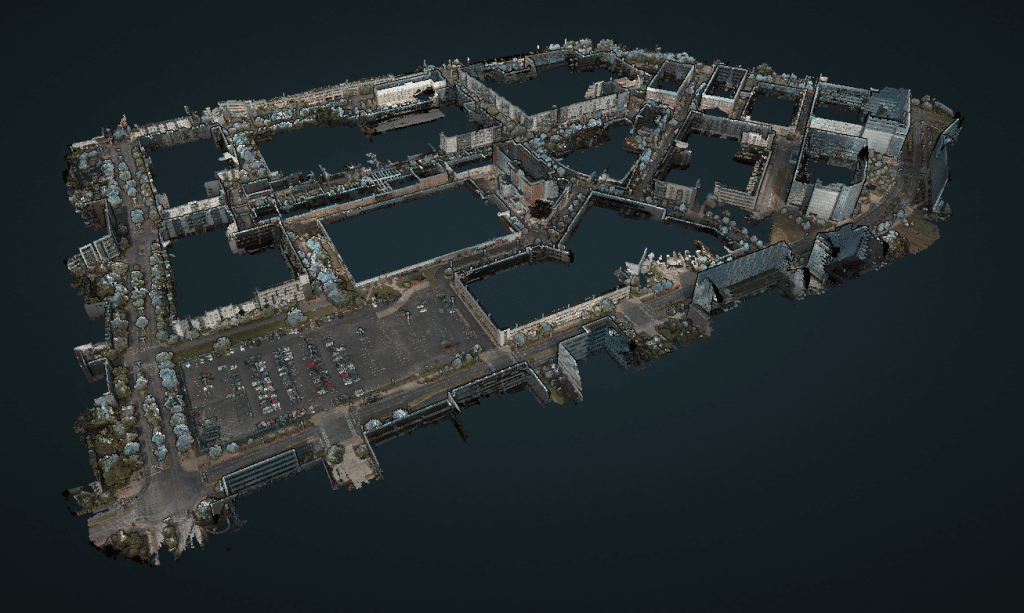
Caltech Group invested in a RANGER-LR mapping solution from Phoenix LiDAR Systems, allowing them to rapidly scan as-built facilities with high accuracy in a single day – the main motivator for acquiring a dual purpose UAS and terrestrial mapping system.
The derived data deliverables acted as a ‘digital twin’ of their clients’ facilities, empowering the end users to digitally visit their facilities and make informed decisions. The value-added ability to easily disseminate 3D geospatial data in a user-friendly format facilitated collaboration with people across all skill levels – both internally within their organizations and externally with subcontractors.
“The biggest advantage to purchasing the Phoenix Ranger LR system is its adaptability. It allowed our team to continue to offer UAS MMS services, but also to branch out into terrestrial MMS & helicopter-based MMS for larger area mapping & linear corridors.”
– Greg Stamnes, AScT, CMS – Geospatial Manager
Caltech Group
Acquisition
Step 1: Caltech accomplished the complex facility as-built mapping project by first mounting the RANGER-LR payload with 360-degree Ladybug camera to a truck and traversed through the site collecting 360-degree high-density lidar and spherical imagery.
Step 2: After the drive, they removed the payload from the truck, mounted the Sony A7R2 camera to it, and affixed the payload to an Alta X UAV, all without leaving the job site. This configuration enabled them to quickly collect aerial high-density lidar and imagery over the facility.
Step 3: The final step was to merge both the mobile and aerial pointclouds into a single cohesive dataset to be shared with the end user.
Results
Deploying the vehicle-adaptable RANGER-LR mapping solution allowed Caltech to successfully complete the data collection and turn around the deliverable facility as-built within a very short timeline. All project deliverables met or exceeded ASPRS accuracy specifications. The combination of rapid data collection, processing time, and data quality resulted in additional customer quotations for larger projects, subsequently awarded to the Caltech team.
Parameters
- Survey Area: 160-acre site
- Platform: Mobile Scan (truck) + Aerial Scan (Freefly Alta X)
- Site Features: Complex Pipe network, buildings, and equipment
- Time: 8 hours on site
Application
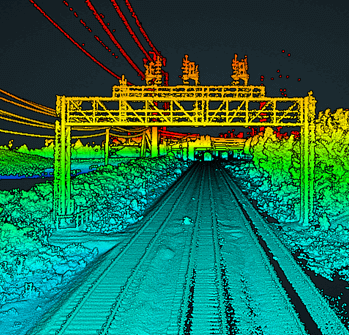
The transportation side of CSX moves multi-million dollar equipment, from oversized generators to military equipment. To ensure the expensive cargo arrives safely to its destination, CSX first scans the planned route to extract cross-sections of bridges, tunnels, and other overhead obstructions from the LiDAR in order to identify clearance hazards prior to transport.
Results
CSX now owns and operates seven Phoenix LiDAR systems. (4) SCOUT-16 systems mounted on high-rail trucks with Ladybug cameras and (3) SCOUT-32 systems permanently installed on the backs of rolling rail cars. The high-rail trucks can travel on both road and railroad with this flexibility enabling them to go anywhere at any time to support immediate business requests. The rail-based geometry cars are designated to travel and cover the entire 21,000+ mile network at least one time per year as part of their safety protection protocol, with LiDAR continuously collecting data.
Parameters
Site: Rail Corridor
Solution: SCOUT-16 & SCOUT-32
AGL: 4 m
Ground Speed: 25-40 mph
Point Density: 800+ ppsm


Speed: 20-30 mph
Point density: >2000 points/m²
AGL: Ground level
Acquisition time: 1.5 hrs
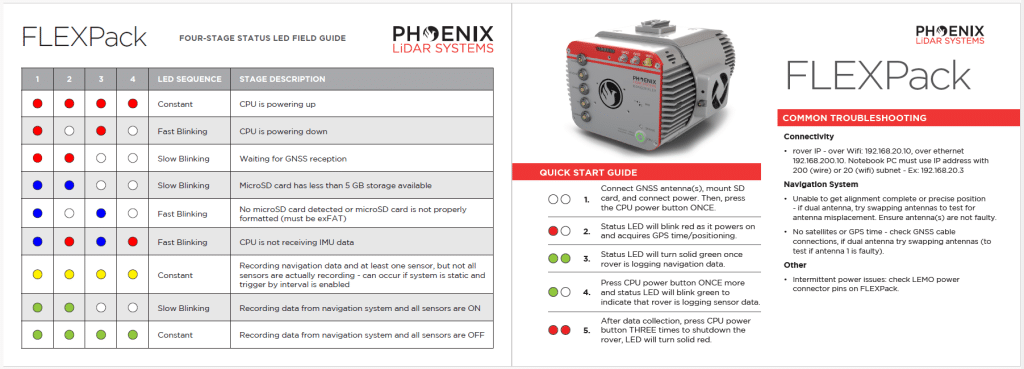
Ensure your LiDAR system is ready for field operations with our comprehensive RANGER Flex LED Quick Start Guide. Download now to streamline setup and maximize performance.