Watershed Science
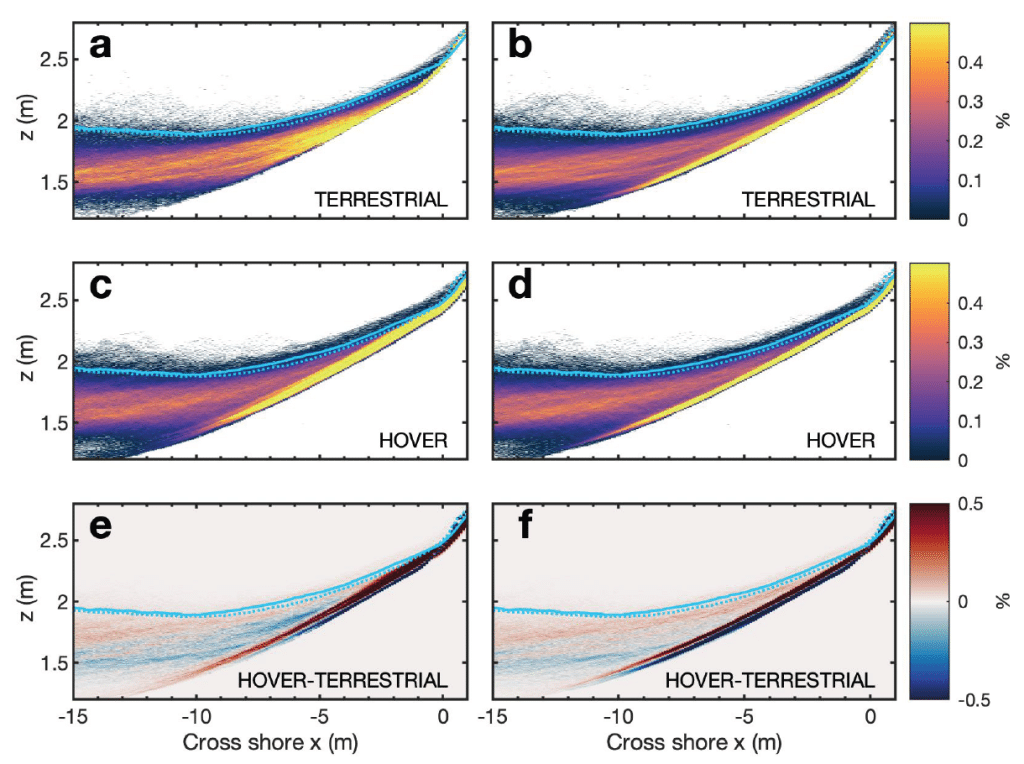
In this whitepaper, we explore the innovative application of a hovering drone-mounted LiDAR system paired with a survey-grade satellite and inertial positioning system to measure wave transformation and runup in the surf zone. Unlike traditional methods, the multi-rotor small uncrewed aircraft system (sUAS) offers unobstructed measurements by hovering above the surf zone at a 20-meter elevation, scanning a 150-meter-wide cross-shore transect.
This approach allows rapid and precise data collection in remote locations where terrestrial scanning is challenging. Our study demonstrates that hovering drone-mounted LiDAR provides measurement accuracy almost equivalent to a stationary truck-mounted terrestrial LiDAR. By conducting observations in various surf conditions and validating with traditional land-based surveys and pressure sensors, we achieved a stable back beach topography estimate.
We also calculated statistical wave properties, runup values, and bathymetry inversions using a simple nonlinear correction to wave crest phase speed. This method shows the potential of drone-based LiDAR for accurate nearshore process observations, enabling data collection in previously inaccessible sites and providing valuable validation for coastal models.
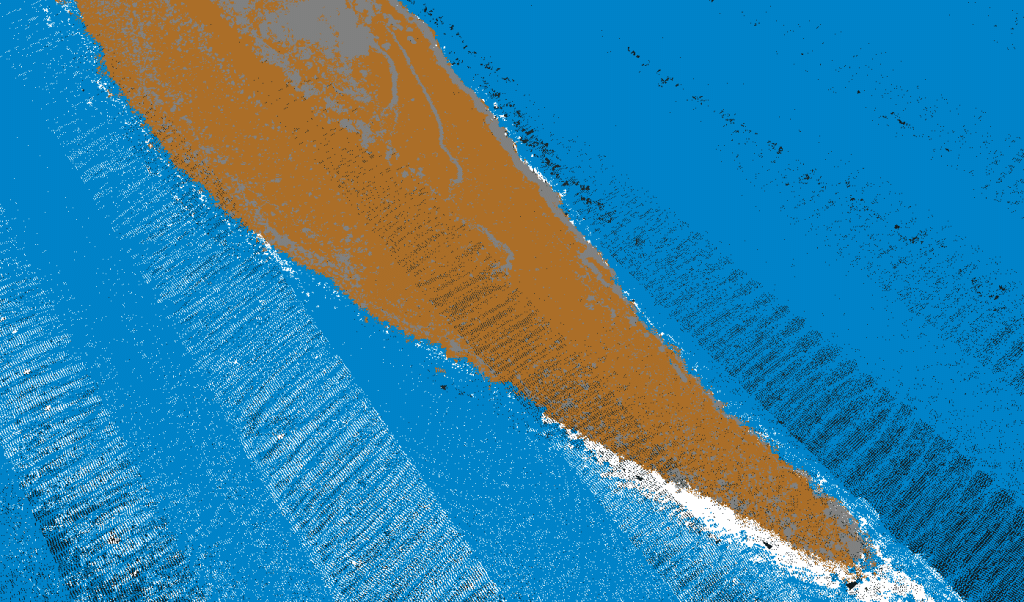
Speed: 60 kn
Point density: 21 points/m² per flight line
AGL: 750 m
Acquisition time: 1 hour
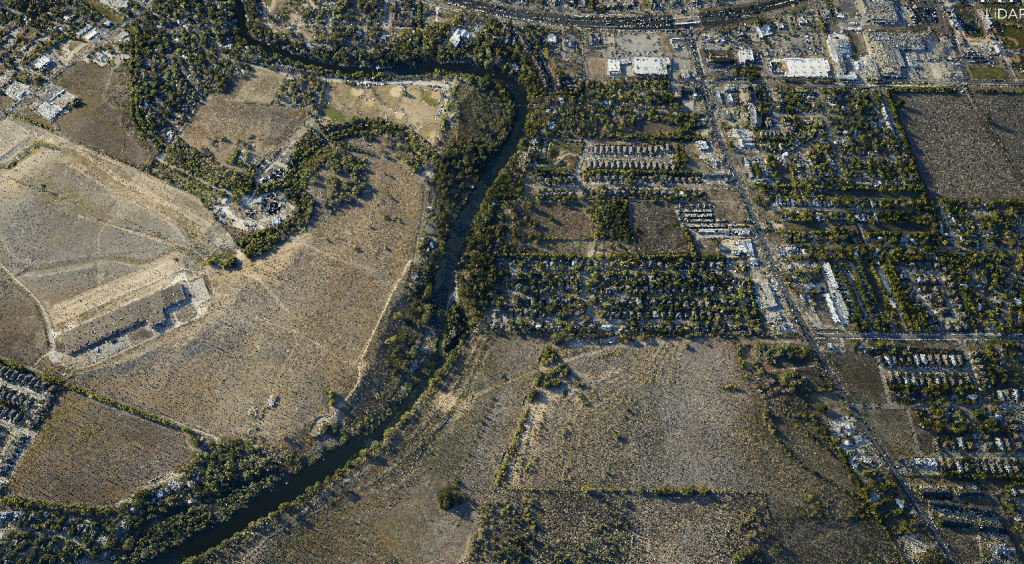
The high dimensionality of data generated by Unmanned Aerial Vehicle(UAV)-Lidar makes it difficult to use classical statistical techniques to design accurate predictive models from these data for conducting forest inventories. Machine learning techniques have the potential to solve this problem of modeling forest attributes from remotely sensed data. This work tests four different machine learning approaches – namely Support Vector Regression, Random Forest, Artificial Neural Networks, and Extreme Gradient Boosting – on high-density GatorEye UAV-Lidar point clouds for indirect estimation of individual tree dendrometric metrics (field-derived) such as diameter at breast height, total height, and timber volume.
We’re excited to announce the release of LiDARMill v2! LiDARMill v2 takes automated post-processing to the next level. In our recent webinar, we covered some of the new improvements and features including:
- Imagery Processing in LiDARMill
- Ground Control Reporting and Adjustments
- Robust Coordinate System Handling
- A Workflow Overview and Demonstration
- Multi-Mission Processing Support
- Advanced Point Cloud Filtering Options
- RGB Thermal & Fusion
- Accuracy Reporting
- Automated LiDAR and Camera Calibration Options
- Near-Real Time (NRT) Reference Station Positioning for Projects Requiring Less Than 24 Hour Turn-around Time
- Trajectory Post-Processing Without Reference Stations
If you have any questions or would like to learn more about LiDARMill v2, please don’t hesitate to get in touch. We’d be happy to help!